Simple implementation
Let us first implement the computational formulas for the linear damping case in a short and compact Python function:
from numpy import *
def solver_linear_damping(I, V, m, b, s, F, t):
N = t.size - 1 # No of time intervals
dt = t[1] - t[0] # Time step
u = zeros(N+1) # Result array
u[0] = I
u[1] = u[0] + dt*V + dt**2/(2*m)*(-b*V - s(u[0]) + F[0])
for n in range(1,N):
u[n+1] = 1./(m + b*dt/2)*(2*m*u[n] + \
(b*dt/2 - m)*u[n-1] + dt**2*(F[n] - s(u[n])))
return u
Dissection of the code
Functions in Python start with def, followed by the function name and
the list of input objects separated by comma. The function body is
indented, and the first non-indented line signifies the end of the function
body block. Output objects are returned to the calling code by a
return statement.
The arguments to this function and the variables created
inside the function are not declared with type. We therefore need to
know what the variables are supposed to be: I, V, m, and b
are real numbers, while F and t are one-dimensional arrays of
the same length, where F holds \( F(t_n) \) and t holds \( t_n \),
\( n=0,1,\ldots,N+1 \).
The number of elements in an array t is given by t.size (or
len(t), but t.size works for multi-dimensional arrays too).
Arrays are indexed by square brackets, and indices always start at 0.
Numerical codes frequently needs to loop over array indices, i.e.,
a set of integers. Such a set
is produced by range(start, stop, increment), which returns a
list of integers start, start+increment, start+2*increment, and so on,
up to but not including stop. Writing just range(stop) means
range(0, stop, 1). The particular call range(1, N) used in the code
above results in a list of integers: 1, 2, ..., N-1.
Array functionality is enabled by the numpy package, which offers
functions such as zeros and linspace, as known from Matlab.
Here we import all objects in the numpy package by the statement
from numpy import *
Comments start with the character # and the rest of the line
is then ignored by Python.
Every variable in Python is an object. In particular, the s function
above is a function object, transferred to the function as any other
object, and called as any other function. Transferring a function as
argument to another function is therefore simpler and cleaner in Python
than in, e.g., C, C++, Java, C#, and Matlab.
How can we use the solver_linear_damping function? We need to call it
with relevant values for the arguments. Suppose we want to solve
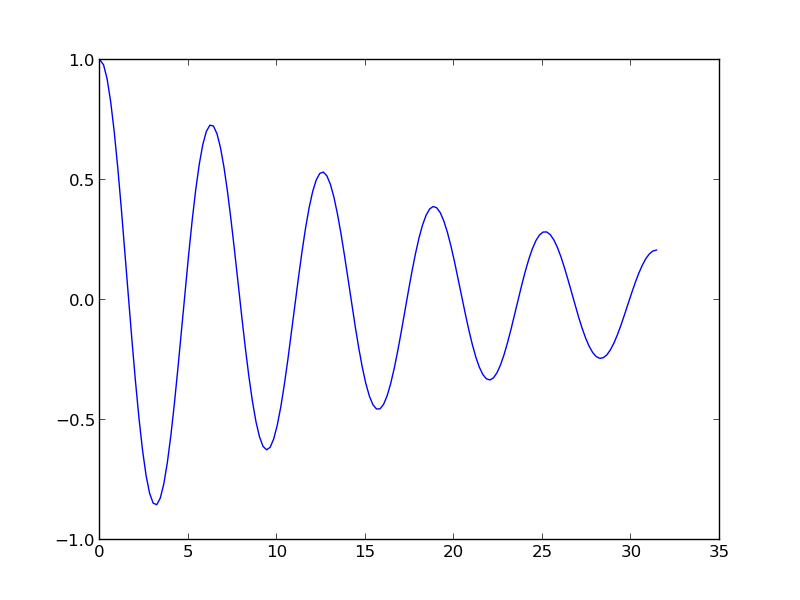
a vibration problem with \( I=1 \), \( V=0 \),
\( F=0 \), \( m=2 \), \( b=0.2 \), \( s(u)=2u \), \( \Delta t=0.2 \),
for \( t\in [0,10\pi] \). This will be a damped sinusoidal solution
(setting \( b=0 \) will result in \( u(t)=\cos t \)).
The test code becomes
from solver import solver_linear_damping
from numpy import *
def s(u):
return 2*u
T = 10*pi # simulate for t in [0,T]
dt = 0.2
N = int(round(T/dt))
t = linspace(0, T, N+1)
F = zeros(t.size)
I = 1; V = 0
m = 2; b = 0.2
u = solver_linear_damping(I, V, m, b, s, F, t)
from matplotlib.pyplot import *
plot(t, u)
savefig('tmp.pdf') # save plot to PDF file
savefig('tmp.png') # save plot to PNG file
show()
The solver_linear_damping function resides in the file solver.py,
so if we make the call to this function in separate file (assumed above),
we have to import the function as shown. We also need functions and
variables from
the numpy package, here pi, linspace, and zeros.
Normally, there is one statement per line in Python programs, and there
is no need to end the statement with a semicolon. However, if we
want multiple statements on a line, they must be separated by semi colon
as demonstrated in the initialization of I and V. Plotting the
computed curve makes use of the matplotlib package, where we call
its plot, savefig, and show functions. Figure 2
shows the result.
Figure 2: Plot of computed curve.