A scientific application
Physical problem and mathematical model
The task is to make a simulation program that can predict how a (simple) mechanical system oscillates in response to environmental forces. Introducing \( u(t) \) as some displacement of the system at time \( t \), application of Newton's second law of motion to such a mechanical system often results in the following type of equation for \( u \): $$ \begin{equation} mu'' + f(u') + s(u) = F(t), \tag{1} \end{equation} $$ The prime, as in \( u' \), denotes differentiation with respect to time (\( u'(t) \) or \( du/dt \)). Furthermore, \( m \) is the mass of the system, \( f(u') \) is a friction force that gives rise to a damping of the motion, \( s(u) \) represents a restoring force, such as a spring, and \( F(t) \) models the external environmental forces on the system. Equation (1) must be accompanied by two initial conditions: \( u(0)=I \) and \( u'(0)=V \). The values of these have no effect on the steady state behavior of \( u(t) \) for large values of \( t \), since this behavior is determined by the force \( F(t) \) and the system parameters \( m \), \( f(u') \), and \( s(u) \).
There are two types of the friction force \( f \): linear damping \( f(u')=bu' \) and quadratic damping \( f(u')=bu'|u'| \). The input data consists of \( m \), \( b \), \( s(u) \), \( F(t) \), \( I \), \( V \), and specification of linear or quadratic damping. The unknown quantity to be computed is \( u(t) \) for \( t\in (0,T] \).
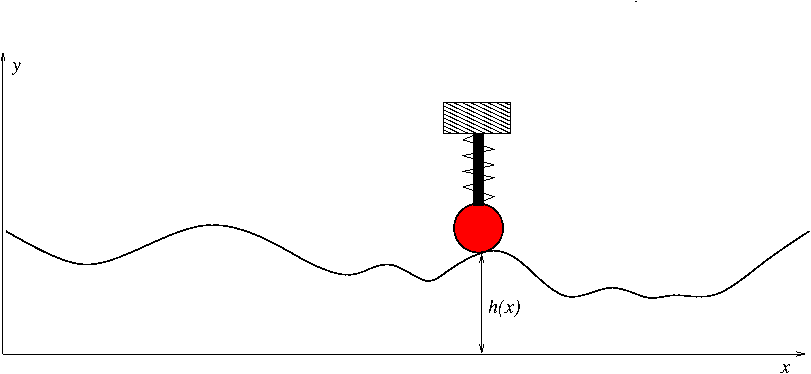
One example where the model above has relevance, is the vertical vibration of a vehicle in response to a bumpy road. Let \( h(x) \) be the height of the road at some coordinate \( x \) along the road. When driving along this road with constant velocity \( v \), the vehicle is moved up and down in time according to \( h(vt) \), resulting in an external vertical force \( F(t)=-mh''(vt)v^2 \). We assume that the vehicle has springs and dampers that here are modeled as \( bu' \) (damper) and \( s(s)=ku \) (spring), with given damping parameter \( b \) and spring constant \( k \). The unknown \( u(t) \) is the vertical displacement of the vehicle relative to the road. Figure 1 illustrates the situation. You may view an animation of such a motion on the web (by the way, this animation was created by coupling the Pysketcher tool for figure drawings with the differential equation solver presented later, see the script bumpy_road_fig.py for all details).
Figure 1: Vehicle on a bumpy road.
Another example regards the vertical shaking of a building due to earthquake-induced movement of the ground. If the vertical displacement of the ground is recorded as a function \( d(t) \), this results in a vertical force \( F(t)=-md''(t) \). The soil foundation acts as a spring and damper on the building, modeled through the damping parameter \( b \) and normally a linear spring term \( s(u)=ku \).
In both cases we drop the effect of gravity, which is just a constant compression of the spring.
Our task is to compute and analyze the vertical \( u(t) \) vibrations of a vehicle, given the shape \( h(x) \) of the road and some velocity \( v \).