This chapter is taken from the book A Primer on Scientific Programming with Python by H. P. Langtangen, 5th edition, Springer, 2016.
Exercises
Exercise 1: Implement a simple mathematical function
Implement the mathematical function
$$ g(t) = e^{-t}\sin(\pi t),$$
in a Python function g(t). Print out \( g(0) \) and \( g(1) \).
Filename: expsin.
Exercise 2: Implement a simple mathematical function with a parameter
Let us extend the function \( g(t) \) in Exercise 1: Implement a simple mathematical function to
$$ h(t) = e^{-at}\sin(\pi t),$$
where \( a \) is a parameter. How can the corresponding Python function
be implemented in this case?
Print out \( h(0) \) and \( h(1) \) for the case \( a=10 \).
Filename: expsin_a.
Exercise 3: Explain how a program works
Explain how the following program works:
def add(A, B):
C = A + B
return C
a = 3
b = 2
print add(a, b)
print add(2*a, b+1)*3
Figure out what is being printed without running the program.
Filename: explain_func.
Exercise 4: Write a Fahrenheit-Celsius conversion functions
The formula for converting Fahrenheit degrees to Celsius reads
$$
\begin{equation} C = \frac{5}{9}(F - 32)\tp
\tag{7}
\end{equation}
$$
Write a function C(F) that implements this formula.
Also write the inverse function F(C) for going from Celsius to
Fahrenheit degrees.
How can you test that the two functions work?
C(F(c)) should result in c and
F(C(f)) should result in f.
Filename: f2c.
Exercise 5: Write a test function for Exercise 4: Write a Fahrenheit-Celsius conversion functions
Write a test function test_F_C that checks the computation of
C(F(c)) and F(C(f)), involving the
C(F) and F(C) functions in Exercise 4: Write a Fahrenheit-Celsius conversion functions.
Use a tolerance in the comparison. Let the test function follow the conventions in the nose and pytest frameworks (see the section ref{bioinf:count:verify} for a first intro and the section ref{sec:nose} for more overview).
Filename: test_f2c.
Exercise 6: Given a test function, write the function
Here is a test function:
def test_double():
assert double(2) == 4
assert abs(double(0.1) - 0.2) < 1E-15
assert double([1, 2]) == [1, 2, 1, 2]
assert double((1, 2)) == (1, 2, 1, 2)
assert double(3+4j) == 6+8j
assert double('hello') == 'hellohello'
Write the associated function to be tested (double) and run test_double.
Filename: test_double.
Exercise 7: Evaluate a sum and write a test function
a)
Write a Python function sum_1k(M) that returns the sum
\( s = \sum_{k=1}^M {1\over k} \).
b)
Compute \( s \) for the case \( M=3 \) by hand and write another function
test_sum_1k() that calls sum_1k(3) and checks that the
answer is correct.
We recommend that test_sum_1k follows the conventions of the pytest and nose
testing
frameworks.
Filename: sum_func.
Exercise 8: Write a function for solving \( ax^2 + bx + c =0 \)
a)
Given a quadratic equation \( ax^2 + bx + c =0 \), write a function
roots(a, b, c) that returns the two roots of the equation.
The returned roots should be float-type objects when the roots are real,
otherwise complex-type objects.
You can test on the sign of the expression in the square root
and return standard float or complex Python objects accordingly.
Alternatively,
you can simply use sqrt from the numpy.lib.scimath
library.
This sqrt function returns an object of type numpy.complex128 in case of
a negative argument (and hence a complex square root)
and an object of type numpy.float64 otherwise.
b)
Construct two test cases with known solutions, one with real roots and
the other with complex roots. Implement the two test cases in two
test functions test_roots_float and test_roots_complex, where you
call the roots function and check the value of the
returned objects.
Filename: roots_quadratic.
Exercise 9: Implement the sum function
The standard Python function called sum takes a list as argument
and computes the sum of the elements in the list:
>>> sum([1,3,5,-5])
4
>>> sum([[1,2], [4,3], [8,1]])
[1, 2, 4, 3, 8, 1]
>>> sum(['Hello, ', 'World!'])
'Hello, World!'
Implement your own version of sum.
Filename: mysum.
Exercise 10: Compute a polynomial via a product
Given \( n+1 \) roots \( r_0,r_1,\ldots,r_{n} \) of a polynomial \( p(x) \) of degree
\( n+1 \), \( p(x) \) can be computed by
$$
\begin{equation}
p(x) = \prod_{i=0}^{n}(x-r_i) = (x-r_0)(x-r_1)\cdots (x-r_{n-1})(x-r_{n})
\tag{8}
\tp
\end{equation}
$$
Write a function poly(x, roots) that takes \( x \) and a list roots
of the roots as arguments and returns \( p(x) \).
Construct a test case for verifying the implementation.
Filename: polyprod.
Exercise 11: Integrate a function by the Trapezoidal rule
a)
An approximation to the integral of a function \( f(x) \) over an interval
\( [a,b] \) can be found by first approximating \( f(x) \) by the straight line
that goes through the end points \( (a,f(a)) \) and \( (b,f(b)) \), and then
finding the area under the straight line, which is the area of a
trapezoid. The resulting formula becomes
$$
\begin{equation} \int_a^b f(x)dx \approx {b-a\over 2}(f(a) + f(b))\tp
\tag{9}
\end{equation}
$$
Write a function trapezint1(f, a, b) that returns this approximation
to the integral. The argument f is a Python implementation f(x) of
the mathematical function \( f(x) \).
b) Use the approximation (9) to compute the following integrals: \( \int_0^\pi \cos x\, dx \), \( \int_0^\pi \sin x\, dx \), and \( \int_0^{\pi/2} \sin x\, dx \), In each case, write out the error, i.e., the difference between the exact integral and the approximation (9). Make rough sketches of the trapezoid for each integral in order to understand how the method behaves in the different cases.
c)
We can easily improve the formula (9) by
approximating the area under the function \( f(x) \) by two equal-sized
trapezoids. Derive a formula for this approximation and implement it
in a function trapezint2(f, a, b). Run the examples from b)
and see how much better the new formula is. Make sketches of the two
trapezoids in each case.
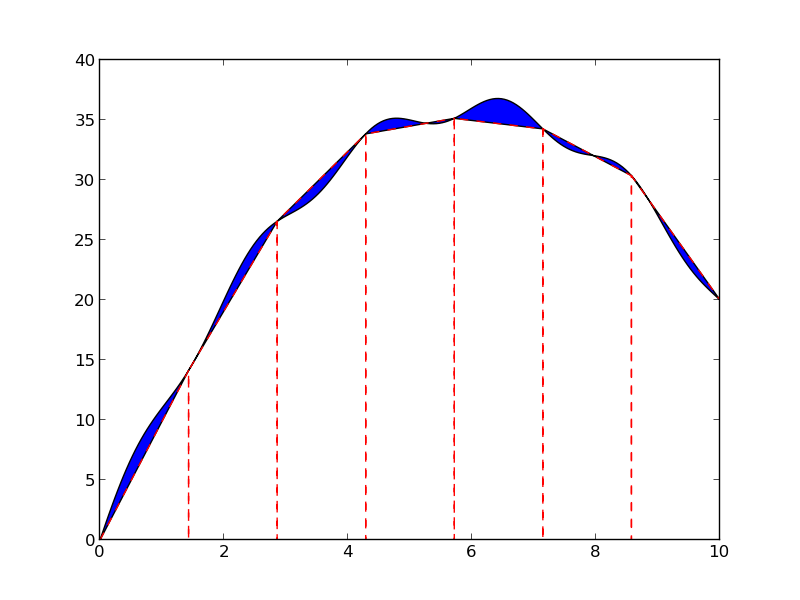
d) A further improvement of the approximate integration method from c) is to divide the area under the \( f(x) \) curve into \( n \) equal-sized trapezoids. Based on this idea, derive the following formula for approximating the integral: $$ \begin{equation} \int_a^b f(x) dx \approx \sum_{i=1}^{n-1} \frac{1}{2}h\left(f(x_{i})+f(x_{i+1}) \right), \tag{10} \end{equation} $$ where \( h \) is the width of the trapezoids, \( h = (b-a)/n \), and \( x_i=a + ih \), \( i=0,\ldots,n \), are the coordinates of the sides of the trapezoids. The figure below visualizes the idea of the Trapezoidal rule.
Implement (10) in a Python function
trapezint(f, a, b, n). Run the examples from b) with \( n=10 \).
e)
Write a test function test_trapezint() for verifying the
implementation of the function trapezint in d).
Obviously, the Trapezoidal method integrates linear functions exactly
for any \( n \). Another more surprising result is that the method is also
exact for, e.g., \( \int_0^{2\pi} \cos x\, dx \) for any \( n \).
Use one of these cases for the test function test_trapezint.
Filename: trapezint.
Remarks
Formula (10) is not the most common way of expressing the Trapezoidal integration rule. The reason is that \( f(x_{i+1}) \) is evaluated twice, first in term \( i \) and then as \( f(x_{i}) \) in term \( i+1 \). The formula can be further developed to avoid unnecessary evaluations of \( f(x_{i+1}) \), which results in the standard form $$ \begin{equation} \int_a^b f(x)dx\approx \frac{1}{2}h(f(a)+ f(b)) + h\sum_{i=1}^{n-1} f(x_i)\tp \tag{11} \end{equation} $$
Exercise 12: Derive the general Midpoint integration rule
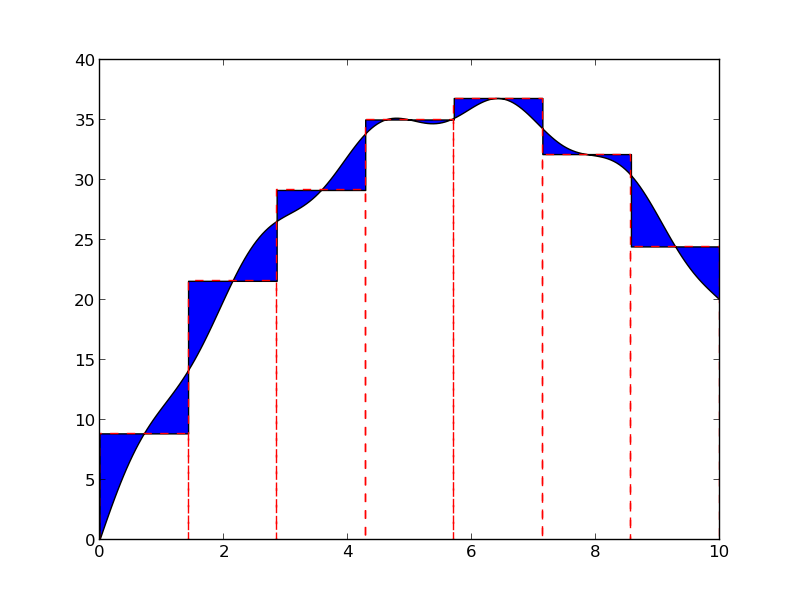
The idea of the Midpoint rule for integration is to divide the area under the curve \( f(x) \) into \( n \) equal-sized rectangles (instead of trapezoids as in Exercise 11: Integrate a function by the Trapezoidal rule). The height of the rectangle is determined by the value of \( f \) at the midpoint of the rectangle. The figure below illustrates the idea.
Compute the area of each rectangle, sum them up, and arrive at the
formula for the Midpoint rule:
$$
\begin{equation}
\int_a^b f(x)dx \approx h\sum_{i=0}^{n-1} f(a + ih + \frac{1}{2}h),
\tag{12}
\end{equation}
$$
where \( h=(b-a)/n \) is the width of each rectangle. Implement this formula
in a Python function midpointint(f, a, b, n) and test
the function on the examples listed in Exercise 11: Integrate a function by the Trapezoidal ruleb.
How do the errors in the Midpoint rule compare with those of
the Trapezoidal rule for \( n=1 \) and \( n=10 \)?
Filename: midpointint.
Exercise 13: Make an adaptive Trapezoidal rule
A problem with the Trapezoidal integration rule (10) in Exercise 11: Integrate a function by the Trapezoidal rule is to decide how many trapezoids (\( n \)) to use in order to achieve a desired accuracy. Let \( E \) be the error in the Trapezoidal method, i.e., the difference between the exact integral and that produced by (10). We would like to prescribe a (small) tolerance \( \epsilon \) and find an \( n \) such that \( E\leq\epsilon \).
Since the exact value \( \int_a^bf(x)dx \) is not available (that is why we use a numerical method!), it is challenging to compute \( E \). Nevertheless, it has been shown by mathematicians that $$ \begin{equation} E \leq \frac{1}{12}(b-a)h^2\max_{x\in [a,b]}\left\vert f''(x)\right\vert\tp \tag{13} \end{equation} $$ The maximum of \( |f''(x)| \) can be computed (approximately) by evaluating \( f''(x) \) at a large number of points in \( [a,b] \), taking the absolute value \( |f''(x)| \), and finding the maximum value of these. The double derivative can be computed by a finite difference formula: $$ f''(x)\approx \frac{f(x+h) - 2f(x) + f(x-h)}{h^2}\tp$$
With the computed estimate of \( \max |f''(x)| \) we can find \( h \) from setting the right-hand side in (13) equal to the desired tolerance: $$ \begin{equation*} \frac{1}{12}(b-a)h^2\max_{x\in [a,b]}\left\vert f''(x)\right\vert = \epsilon\tp \end{equation*} $$ Solving with respect to \( h \) gives $$ \begin{equation} h = \sqrt{12\epsilon}\left( (b-a)\max_{x\in [a,b]}\left\vert f''(x)\right\vert\right)^{-1/2}\tp \tag{14} \end{equation} $$ With \( n=(b-a)/h \) we have the \( n \) that corresponds to the desired accuracy \( \epsilon \).
a)
Make a Python function adaptive_trapezint(f, a, b, eps=1E-5)
for computing the integral \( \int_a^b f(x)dx \) with an error
less than or equal to \( \epsilon \) (eps).
Compute the \( n \) corresponding to \( \epsilon \) as explained above and
call trapezint(f, a, b, n) from Exercise 11: Integrate a function by the Trapezoidal rule.
b) Apply the function to compute the integrals from Exercise 11: Integrate a function by the Trapezoidal ruleb. Write out the exact error and the estimated \( n \) for each case.
Filename: adaptive_trapezint.
Remarks
A numerical method that applies an expression for the error to adapt the choice of the discretization parameter to a desired error tolerance, is known as an adaptive numerical method. The advantage of an adaptive method is that one can control the approximation error, and there is no need for the user to determine an appropriate number of intervals \( n \).
Exercise 14: Simulate a program by hand
Simulate the following program by hand to explain what is printed.
If you encounter problems with understanding function calls and local versus global variables, paste the code into the Online Python Tutor and step through the code to get a better explanation of what happens.
Filename: simulate_func.
Exercise 15: Debug a given test function
Given a Python function
def triple(x):
return x + x*2
we want to test it with a proper test function. The following function is written
def test_triple():
assert triple(3) == 9
assert triple(0.1) == 0.3
assert triple([1, 2]) == [1, 2, 1, 2, 1, 2]
assert triple('hello ') == 'hello hello 2'
What is wrong with the test function? Write a test function
where all boolean comparisons work well.
Filename: test_triple.
Exercise 16: Compute the area of an arbitrary triangle
An arbitrary triangle can be described by the coordinates of its
three vertices: \( (x_1,y_1) \), \( (x_2,y_2) \), \( (x_3, y_3) \), numbered in
a counterclockwise direction.
The area of the triangle is given by the formula
$$
\begin{equation}
A=\frac{1}{2}\left\vert x_2y_3 - x_3y_2 - x_1y_3 + x_3y_1 + x_1y_2 - x_2y_1\right\vert
\tp
\tag{15}
\end{equation}
$$
Write a function triangle_area(vertices) that returns the area of a triangle
whose vertices are specified by the argument vertices, which is
a nested list of the vertex coordinates. Make sure your
implementation passes the following test function, which also illustrates
how the triangle_area function works:
def test_triangle_area():
"""
Verify the area of a triangle with vertex coordinates
(0,0), (1,0), and (0,2).
"""
v1 = (0,0); v2 = (1,0); v3 = (0,2)
vertices = [v1, v2, v3]
expected = 1
computed = triangle_area(vertices)
tol = 1E-14
success = diff(expected - computed) < tol
msg = 'computed area=%g != %g (expected)' % \
(computed, expected)
assert success, msg
Filename: area_triangle.
Exercise 17: Compute the length of a path
Some object is moving along a path in the plane. At \( n+1 \) points of time we have recorded the corresponding \( (x,y) \) positions of the object: \( (x_0,y_0) \), \( (x_1,y_2) \), \( \ldots \), \( (x_{n},y_{n}) \). The total length \( L \) of the path from \( (x_0,y_0) \) to \( (x_{n},y_{n}) \) is the sum of all the individual line segments (\( (x_{i-1},y_{i-1}) \) to \( (x_{i},y_{i}) \), \( i=1,\ldots,n \)): $$ \begin{equation} L = \sum_{i=1}^{n} \sqrt{ (x_i-x_{i-1})^2 + (y_i - y_{i-1})^2}\tp \tag{16} \end{equation} $$
a)
Make a Python function pathlength(x, y) for computing \( L \) according to
the formula. The arguments x and y hold all the
\( x_0,\ldots,x_{n} \) and \( y_0,\ldots,y_{n} \) coordinates, respectively.
b)
Write a test function test_pathlength() where you check that
pathlength returns the correct length in a test problem.
Filename: pathlength.
Exercise 18: Approximate \( \pi \)
The value of \( \pi \) equals the circumference of a circle with radius \( 1/2 \).
Suppose we approximate the circumference by a polygon through \( n+1 \)
points on the circle. The length of this polygon can be found
using the pathlength function from
Exercise 17: Compute the length of a path.
Compute \( n+1 \) points \( (x_i,y_i) \) along a circle with radius \( 1/2 \)
according to the formulas
$$
\begin{equation*}
x_i=\frac{1}{2}\cos (2\pi i /n),\quad
y_i=\frac{1}{2}\sin (2\pi i/n), \quad
i=0,\ldots,n\tp
\end{equation*}
$$
Call the pathlength function and write out the error in the
approximation of \( \pi \) for \( n=2^k \), \( k=2,3,\ldots,10 \).
Filename: pi_approx.
Exercise 19: Compute the area of a polygon
One of the most important mathematical problems through all times has been
to find the area of a polygon. For example, real estate areas often
had the shape of polygons, and the tax was proportional to the area.
Suppose we have some polygon with
vertices ("corners") specified by the coordinates
\( (x_1,y_1) \), \( (x_2,y_2) \),
\( \ldots \), \( (x_n, y_n) \), numbered either in a clockwise or
counter clockwise fashion around the polygon.
The area \( A \) of the polygon can amazingly be computed by just knowing the
boundary coordinates:
$$
\begin{align}
A = \frac{1}{2}| & (x_1y_2+x_2y_3 + \cdots + x_{n-1}y_n + x_ny_1) -\nonumber\\
& (y_1x_2 + y_2x_3 + \cdots + y_{n-1}x_n + y_nx_1)|\thinspace .
\tag{17}
\end{align}
$$
Write a function polygon_area(x, y) that takes two coordinate lists
with the
vertices as arguments and returns the area.
Test the function on a triangle, a quadrilateral, and a pentagon where you can calculate the area by alternative methods for comparison.
Since Python lists and arrays has 0 as their first index, it is wise to rewrite the mathematical formula in terms of vertex coordinates numbered as \( x_0,x_1,\ldots,x_{n-1} \) and \( y_0, y_1,\ldots,y_{n-1} \) before you start programming.
Filename: polygon_area.
Exercise 20: Write functions
Three functions, hw1, hw2, and hw3, work as follows:
>>> print hw1()
Hello, World!
>>> hw2()
Hello, World!
>>> print hw3('Hello, ', 'World!')
Hello, World!
>>> print hw3('Python ', 'function')
Python function
Write the three functions.
Filename: hw_func.
Exercise 21: Approximate a function by a sum of sines
We consider the piecewise constant function $$ \begin{equation} \tag{18} f(t) = \left\lbrace\begin{array}{ll} 1, & 0 < t < T/2,\\ 0, & t = T/2,\\ -1, & T/2 < t < T \end{array}\right. \end{equation} $$ Sketch this function on a piece of paper. One can approximate \( f(t) \) by the sum $$ \begin{equation} S(t;n) = {4\over\pi}\sum_{i=1}^n {1\over 2i-1} \sin\left( {2(2i-1)\pi t\over T}\right)\tp \tag{19} \end{equation} $$ It can be shown that \( S(t;n)\rightarrow f(t) \) as \( n\rightarrow\infty \).
a)
Write a Python function S(t, n, T) for returning the value of \( S(t;n) \).
b)
Write a Python function f(t, T) for computing \( f(t) \).
c) Write out tabular information showing how the error \( f(t) - S(t;n) \) varies with \( n \) and \( t \) for the cases where \( n=1,3,5,10,30,100 \) and \( t=\alpha T \), with \( T=2\pi \), and \( \alpha =0.01, 0.25, 0.49 \). Use the table to comment on how the quality of the approximation depends on \( \alpha \) and \( n \).
Filename: sinesum1.
Remarks
A sum of sine and/or cosine functions, as in (19), is called a Fourier series. Approximating a function by a Fourier series is a very important technique in science and technology.
Exercise 22: Implement a Gaussian function
Make a Python function gauss(x, m=0, s=1) for computing
the Gaussian function
$$
\begin{equation*}
f(x) =
{1\over\sqrt{2\pi }\, s}
\exp{\left[-\frac{1}{2}\left({x-m\over s}\right)^2\right]}\tp
\end{equation*}
$$
Write out a nicely formatted table of \( x \) and \( f(x) \) values for \( n \)
uniformly spaced \( x \) values in \( [m-5s, m+5s] \). (Choose \( m \), \( s \), and
\( n \) as you like.)
Filename: gaussian2.
Exercise 23: Wrap a formula in a function
Implement the formula for cooking
an egg, see the exercise "How to cook the perfect egg" in the document
Programming with formulas,
in a Python function with three arguments:
egg(M, To=20, Ty=70). The parameters \( \rho \), \( K \), \( c \), and \( T_w \) can
be set as local (constant) variables inside the function. Let \( t \) be
returned from the function. Compute \( t \) for a soft and hard boiled
egg, of a small (\( M=47 \) g) and large (\( M=67 \) g) size, taken from the
fridge (\( T_o=4 \) C) and from a hot room (\( T_o=25 \) C).
Filename: egg_func.
Exercise 24: Write a function for numerical differentiation
The formula $$ \begin{equation} f'(x)\approx {f(x+h)-f(x-h)\over 2h} \tag{20}\end{equation} $$ can be used to find an approximate derivative of a mathematical function \( f(x) \) if \( h \) is small.
a)
Write a function diff(f, x, h=1E-5) that returns the approximation
(20)
of the derivative of a mathematical function represented by a Python
function f(x).
b)
Write a function test_diff() that verifies the implementation
of the function diff. As test case, one can use the fact that
(20) is exact for quadratic functions (at least
for not so small \( h \) values that rounding errors in
(20) become significant - you have to
experiment with finding a suitable tolerance and \( h \)).
Follow the conventions of the pytest and nose testing
frameworks.
c) Apply (20) to differentiate
- \( f(x)=e^x \) at \( x=0 \),
- \( f(x)=e^{-2x^2} \) at \( x=0 \),
- \( f(x)=\cos x \) at \( x=2\pi \),
- \( f(x)=\ln x \) at \( x=1 \).
application().
Filename: centered_diff.
Exercise 25: Implement the factorial function
The factorial of \( n \) is written as \( n! \) and defined as
$$
\begin{equation}
n! = n(n-1)(n-2)\cdots 2\cdot 1,
\tag{21}
\end{equation}
$$
with the special cases
$$
\begin{equation}
1! = 1,\quad 0! = 1\tp
\tag{22}
\end{equation}
$$
For example, \( 4! = 4\cdot 3\cdot 2\cdot 1 = 24 \), and \( 2! = 2\cdot 1 = 2 \).
Write a Python function fact(n) that returns \( n! \).
(Do not simply call the ready-made function
math.factorial(n) - that is considered cheating in this context!)
Make sure your fact function passes the test in the following
test function:
def test_fact():
# Check an arbitrary case
n = 4
expected = 4*3*2*1
computed = fact(n)
assert computed == expected
# Check the special cases
assert fact(0) == 1
assert fact(1) == 1
Return 1 immediately if \( x \) is 1 or 0, otherwise use a loop to compute \( n! \).
Filename: fact.
Exercise 26: Compute velocity and acceleration from 1D position data
Suppose we have recorded GPS coordinates \( x_0,\ldots,x_n \) at times \( t_0,\ldots,t_n \) while running or driving along a straight road. We want to compute the velocity \( v_i \) and acceleration \( a_i \) from these position coordinates. Using finite difference approximations, one can establish the formulas $$ \begin{align} v_i &\approx \frac{x_{i+1}-x_{i-1}}{t_{i+1}-t_{i-1}}, \tag{23}\\ a_i &\approx 2(t_{i+1}-t_{i-1})^{-1}\left(\frac{x_{i+1}-x_{i}}{t_{i+1}-t_i} - \frac{x_{i}-x_{i-1}}{t_{i}-t_{i-1}}\right), \tag{24} \end{align} $$ for \( i=1,\ldots,n-1 \) (\( v_i \) and \( a_i \) correspond to the velocity and acceleration at point \( x_i \) at time \( t_i \), respectively).
a)
Write a Python function kinematics(i, x, t) for computing \( v_i \)
and \( a_i \), given the arrays x and t of position and time coordinates
(\( x_0,\ldots,x_n \) and \( t_0,\ldots,t_n \)).
b)
Write a Python function test_kinematics() for testing the
implementation in the case of constant velocity \( V \).
Set \( t_0=0 \), \( t_1=0.5 \), \( t_2=1.5 \), and \( t_3=2.2 \),
and \( x_i = Vt_i \). Call the kinematics function for the legal \( i \) values.
Filename: kinematics1.
Exercise 27: Find the max and min values of a function
The maximum and minimum values of a mathematical function \( f(x) \)
on \( [a,b] \) can be found by computing \( f \) at a large number (\( n \)) of
points and selecting the maximum and minimum values at these points.
Write a Python function maxmin(f, a, b, n=1000) that returns
the maximum and minimum value of a function f(x). Also write a
test function for verifying the implementation for
\( f(x) = \cos x \), \( x\in [-\pi/2, 2\pi] \).
The \( x \) points where the mathematical function is to be evaluated
can be uniformly distributed: \( x_i = a + ih \), \( i=0,\ldots,n-1 \),
\( h = (b-a)/(n-1) \). The Python functions max(y) and min(y)
return the maximum and minimum values in the list y, respectively.
Filename: maxmin_f.
Exercise 28: Find the max and min elements in a list
Given a list a, the max function in Python's standard
library computes the largest element in a: max(a).
Similarly, min(a) returns the smallest element in a.
Write your own max and min functions.
Initialize a variable max_elem
by the first element in the list, then visit all the remaining elements
(a[1:]), compare each element to max_elem, and if
greater, set max_elem equal to that element.
Use a similar technique to compute the minimum element.
Filename: maxmin_list.
Exercise 29: Implement the Heaviside function
The following step function is known as the Heaviside function and is widely used in mathematics: $$ \begin{equation} H(x) = \left\lbrace\begin{array}{ll} 0, & x < 0\\ 1, & x\geq 0 \end{array}\right. \tag{25} \end{equation} $$
a)
Implement \( H(x) \) in a Python function H(x).
b)
Make a Python function test_H() for testing the implementation of H(x).
Compute \( H(-10) \), \( H(-10^{-15}) \), \( H(0) \), \( H(10^{-15}) \),
\( H(10) \) and test that the answers are correct.
Filename: Heaviside.
Exercise 30: Implement a smoothed Heaviside function
The Heaviside function (25) listed in Exercise 29: Implement the Heaviside function is discontinuous. It is in many numerical applications advantageous to work with a smooth version of the Heaviside function where the function itself and its first derivative are continuous. One such smoothed Heaviside function is $$ \begin{equation} H_{\epsilon}(x) = \left\lbrace \begin{array}{ll} 0, & x < -\epsilon,\\ \frac{1}{2} + {x\over 2\epsilon} + {1\over 2\pi}\sin\left(\pi x\over\epsilon\right), & -\epsilon \leq x \leq \epsilon\\ 1, & x > \epsilon \end{array}\right. \tag{26} \end{equation} $$
a)
Implement \( H_{\epsilon}(x) \) in a Python function H_eps(x, eps=0.01).
b)
Make a Python function test_H_eps() for testing the implementation
of H_eps. Check the values of some \( x < -\epsilon \), \( x=-\epsilon \),
\( x=0 \), \( x=\epsilon \), and some \( x>\epsilon \).
Filename: smoothed_Heaviside.
Exercise 31: Implement an indicator function
In many applications there is need for an indicator function, which is 1 over some interval and 0 elsewhere. More precisely, we define $$ \begin{equation} I(x;L,R) = \left\lbrace\begin{array}{ll} 1, & x\in [L,R],\\ 0, & \hbox{elsewhere} \end{array}\right. \tag{27} \end{equation} $$
a) Make two Python implementations of such an indicator function, one with a direct test if \( x\in [L,R] \) and one that expresses the indicator function in terms of Heaviside functions (25): $$ \begin{equation} I(x;L,R) = H(x-L)H(R-x) \tag{28} \tp \end{equation} $$
b) Make a test function for verifying the implementation of the functions in a). Check that correct values are returned for some \( x < L \), \( x=L \), \( x=(L+R)/2 \), \( x=R \), and some \( x>R \).
Filename: indicator_func.
Exercise 32: Implement a piecewise constant function
Piecewise constant functions have a lot of important applications when modeling physical phenomena by mathematics. A piecewise constant function can be defined as $$ \begin{equation} f(x) = \left\lbrace\begin{array}{ll} v_0, & x\in [x_0, x_1),\\ v_1, & x\in [x_1, x_2),\\ \vdots &\\ v_i & x\in [x_i, x_{i+1}),\\ \vdots &\\ v_n & x\in [x_n, x_{n+1}] \end{array}\right. \tag{29} \end{equation} $$ That is, we have a union of non-overlapping intervals covering the domain \( [x_0,x_{n+1}] \), and \( f(x) \) is constant in each interval. One example is the function that is -1 on \( [0,1] \), 0 on \( [1,1.5] \), and 4 on \( [1.5,2] \), where we with the notation in (29) have \( x_0=0, x_1=1, x_2=1.5, x_3=2 \) and \( v_0=-1, v_1=0, v_3=4 \).
a)
Make a Python function piecewise(x, data) for evaluating a piecewise
constant mathematical function as in (29)
at the point x. The data object is a list of pairs \( (v_i,x_i) \) for
\( i=0,\ldots,n \). For example, data is [(0, -1), (1, 0), (1.5, 4)]
in the example listed above. Since \( x_{n+1} \) is not a part of the
data object, we have no means for detecting whether x is to the
right of the last interval \( [x_n, x_{n+1}] \), i.e., we must assume that
the user of the piecewise function sends in an \( x\leq x_{n+1} \).
b)
Design suitable test cases for the function piecewise and
implement them in a test function test_piecewise().
Filename: piecewise_constant1.
Exercise 33: Apply indicator functions
Implement
piecewise constant functions, as defined in Exercise 32: Implement a piecewise constant function,
by observing that
$$
\begin{equation}
f(x) = \sum_{i=0}^n v_i I(x; x_{i}, x_{i+1}),
\tag{30}
\end{equation}
$$
where \( I(x; x_{i}, x_{i+1}) \) is the indicator function
from Exercise 31: Implement an indicator function.
Filename: piecewise_constant2.
Exercise 34: Test your understanding of branching
Consider the following code:
def where1(x, y):
if x > 0:
print 'quadrant I or IV'
if y > 0:
print 'quadrant I or II'
def where2(x, y):
if x > 0:
print 'quadrant I or IV'
elif y > 0:
print 'quadrant II'
for x, y in (-1, 1), (1, 1):
where1(x,y)
where2(x,y)
What is printed?
Filename: simulate_branching.
Exercise 35: Simulate nested loops by hand
Go through the code below by hand, statement by statement, and calculate the numbers that will be printed.
n = 3
for i in range(-1, n):
if i != 0:
print i
for i in range(1, 13, 2*n):
for j in range(n):
print i, j
for i in range(1, n+1):
for j in range(i):
if j:
print i, j
for i in range(1, 13, 2*n):
for j in range(0, i, 2):
for k in range(2, j, 1):
b = i > j > k
if b:
print i, j, k
You may use a debugger,
or the Online Python Tutor,
see the section Understanding the program flow,
to control what happens when you step through the code.
Filename: simulate_nested_loops.
Exercise 36: Rewrite a mathematical function
We consider the \( L(x;n) \) sum as defined in the section Computing sums
and the corresponding function L3(x, epsilon) function from the section Keyword arguments. The sum \( L(x;n) \) can be written as
$$
\begin{equation*} L(x;n) = \sum_{i=1}^n c_i, \quad c_i = {1\over i}\left( {x\over 1+x}\right)^{i}\tp\end{equation*}
$$
a) Derive a relation between \( c_{i} \) and \( c_{i-1} \), $$ \begin{equation*} c_{i} = ac_{i-1},\end{equation*} $$ where \( a \) is an expression involving \( i \) and \( x \).
b)
The relation \( c_{i}=ac_{i-1} \)
means that we can start with term as \( c_1 \), and then
in each pass of the loop implementing the sum \( \sum_i c_i \) we
can compute the next term \( c_i \) in the sum as
term = a*term
Write a new version of the L3 function, called L3_ci(x, epsilon),
that makes use of this alternative computation of the terms in the sum.
c)
Write a Python function test_L3_ci() that verifies the implementation
of L3_ci by comparing with the original L3 function.
Filename: L3_recursive.
Exercise 37: Make a table for approximations of \( \cos x \)
The function \( \cos (x) \) can be approximated by the sum $$ \begin{equation} C(x;n) = \sum_{j=0}^n c_j, \tag{31} \end{equation} $$ where $$ \begin{equation*} c_j = -c_{j-1}{x^2\over 2j(2j-1)},\quad j=1,2,\ldots, n,\end{equation*} $$ and \( c_0=1 \).
a) Make a Python function for computing \( C(x;n) \).
Represent \( c_j \) by a variable term, make updates term = -term*...
inside a for loop, and accumulate the term variable in a variable
for the sum.
b) Make a function for writing out a table of the errors in the approximation \( C(x;n) \) of \( \cos (x) \) for some \( x \) and \( n \) values given as arguments to the function. Let the \( x \) values run downward in the rows and the \( n \) values to the right in the columns. For example, a table for \( x=4\pi,6\pi,8\pi,10\pi \) and \( n=5, 25, 50, 100, 200 \) can look like
x 5 25 50 100 200 12.5664 1.61e+04 1.87e-11 1.74e-12 1.74e-12 1.74e-12 18.8496 1.22e+06 2.28e-02 7.12e-11 7.12e-11 7.12e-11 25.1327 2.41e+07 6.58e+04 -4.87e-07 -4.87e-07 -4.87e-07 31.4159 2.36e+08 6.52e+09 1.65e-04 1.65e-04 1.65e-04
Observe how the error increases with \( x \) and decreases with \( n \).
Filename: cos_sum.
Exercise 38: Use None in keyword arguments
Consider the functions L2(x, n) and L3(x, epsilon) from the sections Computing sums and
Keyword arguments, whose program code is found in the file
lnsum.py.
Make a more flexible function L4 where we can either specify a
tolerance epsilon or a number of terms n in the sum. Moreover,
we can also choose whether we want the sum to be returned or the sum
and the number of terms:
value, n = L4(x, epsilon=1E-8, return_n=True)
value = L4(x, n=100)
The starting point for all this flexibility is to have some keyword
arguments initialized to an "undefined" value, called None, which can be
recognized inside the function:
def L3(x, n=None, epsilon=None, return_n=False):
if n is not None:
...
if epsilon is not None:
...
One can also apply if n != None, but the is operator is most common.
Print error messages for incompatible values when n and
epsilon are None or both are given by the user.
Filename: L4.
Exercise 39: Write a sort function for a list of 4-tuples
Below is a list of the nearest stars and some of their properties. The list elements are 4-tuples containing the name of the star, the distance from the sun in light years, the apparent brightness, and the luminosity. The apparent brightness is how bright the stars look in our sky compared to the brightness of Sirius A. The luminosity, or the true brightness, is how bright the stars would look if all were at the same distance compared to the Sun. The list data are found in the file stars.txt, which looks as follows:
data = [
('Alpha Centauri A', 4.3, 0.26, 1.56),
('Alpha Centauri B', 4.3, 0.077, 0.45),
('Alpha Centauri C', 4.2, 0.00001, 0.00006),
("Barnard's Star", 6.0, 0.00004, 0.0005),
('Wolf 359', 7.7, 0.000001, 0.00002),
('BD +36 degrees 2147', 8.2, 0.0003, 0.006),
('Luyten 726-8 A', 8.4, 0.000003, 0.00006),
('Luyten 726-8 B', 8.4, 0.000002, 0.00004),
('Sirius A', 8.6, 1.00, 23.6),
('Sirius B', 8.6, 0.001, 0.003),
('Ross 154', 9.4, 0.00002, 0.0005),
]
The purpose of this exercise is to sort this list with respect to
distance, apparent brightness, and luminosity. Write a program that
initializes the data list as above and writes out three sorted
tables: star name versus distance, star name versus apparent
brightness, and star name versus luminosity.
To sort a list data, one can call sorted(data), as in
for item in sorted(data):
...
However, in the present case each element is a 4-tuple, and the
default sorting of such 4-tuples results in a list with the stars
appearing in alphabetic order. This is not what you want. Instead, we
need to sort with respect to the 2nd, 3rd, or 4th element of each
4-tuple. If such a tailored sort mechanism is necessary, we can
provide our own sort function as an argument to sorted. There
are two alternative ways of doing this.
A comparison function.
A sort user-provided
sort function mysort(a, b) must take two
arguments a and b and return \( -1 \) if a should become
before b in the sorted sequence, 1 if b should become before a,
and 0 if they are equal. In the present case, a and b are
4-tuples, so we need to make the comparison between the right elements
in a and b. For example, to sort with respect to luminosity we
can write
def mysort(a, b):
if a[3] < b[3]:
return -1
elif a[3] > b[3]:
return 1
else:
return 0
The relevant call using this tailored sort function is
sorted(data, cmp=mysort)
A key function.
A quicker construction is to provide a key argument to sorted
for filtering out the relevant part of an object to be sorted.
Here, we want to sort 4-tuples, but use only one of the elements,
say the one with index 3, for comparison. Writing
sorted(data, key=lambda obj: obj[3])
will send all objects (4-tuples) through the key function whose
return value
is used for the sorting.
A lambda construction (see the section Lambda functions)
is used to write the filtering function inline.
Filename: sorted_stars_data.
Exercise 40: Find prime numbers
The Sieve of Eratosthenes is an algorithm for finding all prime
numbers less than or equal to a number \( N \). Read about this algorithm
on Wikipedia and implement it in a Python program.
Filename: find_primes.
Exercise 41: Resolve a problem with a function
Consider the following interactive session:
>>> def f(x):
... if 0 <= x <= 2:
... return x**2
... elif 2 < x <= 4:
... return 4
... elif x < 0:
... return 0
...
>>> f(2)
4
>>> f(5)
>>> f(10)
Why do we not get any output when calling f(5) and f(10)?
Save the f value in a variable r and do print r.
Filename: fix_branching.
Exercise 42: Determine the types of some objects
Consider the following calls to
the makelist function from the section Beyond mathematical functions:
l1 = makelist(0, 100, 1)
l2 = makelist(0, 100, 1.0)
l3 = makelist(-1, 1, 0.1)
l4 = makelist(10, 20, 20)
l5 = makelist([1,2], [3,4], [5])
l6 = makelist((1,-1,1), ('myfile.dat', 'yourfile.dat'))
l7 = makelist('myfile.dat', 'yourfile.dat', 'herfile.dat')
Simulate each call by hand to determine what type of objects that
become elements in the returned list and what the contents of value
is after one pass in the loop.
Note that some of the calls will lead to infinite loops
if you really perform the above makelist calls on a computer.
You can go to the Online Python Tutor, paste in the makelist function and
the session above, and step through the program to see what actually
happens.
Filename: find_object_type.
Remarks
This exercise demonstrates that we can write a function and have in mind
certain types of arguments, here typically int and float
objects. However, the function can be used with other (originally unintended)
arguments, such as lists and strings
in the present case, leading to strange and
irrelevant behavior (the problem here lies in the boolean expression
value <= stop which is meaningless for some of the arguments).
Exercise 43: Find an error in a program
For the formula $$ \begin{equation*} f(x)= e^{rx}\sin(mx) + e^{sx}\sin(nx)\end{equation*} $$ we have made the program
Running this code results in
NameError: global name 'expsin' is not defined
What is the problem? Simulate the program flow by hand, use the
debugger to step from line to line, or use the Online Python Tutor.
Correct the program.
Filename: find_error_undef.
References
- H. P. Langtangen. Debugging in Python, \emphhttp://hplgit.github.io/primer.html/doc/pub/debug, http://hplgit.github.io/primer.html/doc/pub/debug.
- H. P. Langtangen. Python Scripting for Computational Science, 3rd edition, Texts in Computational Science and Engineering, Springer, 2009.