PRELIMINARY VERSION
Approximation of vectors
Approximation of planar vectors
The least squares method
The projection method
Approximation of general vectors
The least squares method
The Galerkin or projection method
Approximation of functions
The least squares method
The projection (or Galerkin) method
Example: linear approximation
Implementation of the least squares method
Symbolic integration
Fallback on numerical integration
Plotting the approximation
Perfect approximation
Ill-conditioning
Fourier series
Orthogonal basis functions
Numerical computations
The interpolation (or collocation) method
Example
Lagrange polynomials
Approximation of a polynomial
Successful example
Less successful example
Remedy for strong oscillations
Finite element basis functions
Elements and nodes
Example
The basis functions
Construction principles
Properties of \( \basphi_i \)
Example on piecewise quadratic finite element functions
Example on piecewise linear finite element functions
Example on piecewise cubic finite element basis functions
Calculating the linear system
Calculating a specific matrix entry
Calculating a general row in the matrix
Assembly of elementwise computations
Mapping to a reference element
Example: Integration over a reference element
Implementation
Integration
Linear system assembly and solution
Example on computing symbolic approximations
Comparison with finite elements and interpolation/collocation
Example on computing numerical approximations
The structure of the coefficient matrix
Applications
Sparse matrix storage and solution
Comparison of finite element and finite difference approximation
Finite difference approximation of given functions
Finite difference interpretation of a finite element approximation
Making finite elements behave as finite differences
Computations in physical space
Elementwise computations
Terminology
A generalized element concept
Cells, vertices, and degrees of freedom
Extended finite element concept
Implementation
Computing the error of the approximation
Example: Cubic Hermite polynomials
Numerical integration
Newton-Cotes rules
Gauss-Legendre rules with optimized points
Approximation of functions in 2D
2D basis functions as tensor products of 1D functions
Example: Polynomial basis in 2D
Implementation
Extension to 3D
Finite elements in 2D and 3D
Basis functions over triangles in the physical domain
Element matrices and vectors
Basis functions over triangles in the reference cell
Affine mapping of the reference cell
Isoparametric mapping of the reference cell
Computing integrals
Exercises
Exercise 1: Linear algebra refresher I
Exercise 2: Linear algebra refresher II
Exercise 3: Approximate a three-dimensional vector in a plane
Exercise 4: Approximate the exponential function by power functions
Exercise 5: Approximate the sine function by power functions
Exercise 6: Approximate a steep function by sines
Remarks
Exercise 7: Animate the approximation of a steep function by sines
Exercise 8: Fourier series as a least squares approximation
Exercise 9: Approximate a steep function by Lagrange polynomials
Exercise 10: Define nodes and elements
Exercise 11: Define vertices, cells, and dof maps
Exercise 12: Construct matrix sparsity patterns
Exercise 13: Perform symbolic finite element computations
Exercise 14: Approximate a steep function by P1 and P2 elements
Exercise 15: Approximate a steep function by P3 and P4 elements
Exercise 16: Investigate the approximation error in finite elements
Exercise 17: Approximate a step function by finite elements
Exercise 18: 2D approximation with orthogonal functions
Exercise 19: Use the Trapezoidal rule and P1 elements
Problem 20: Compare P1 elements and interpolation
Exercise 21: Implement 3D computations with global basis functions
Exercise 22: Use Simpson's rule and P2 elements
Basic principles for approximating differential equations
Differential equation models
Simple model problems
Forming the residual
The least squares method
The Galerkin method
The Method of Weighted Residuals
Test and Trial Functions
The collocation method
The subdomain collocation method
Examples on using the principles
The model problem
Basis functions
The residual
The least squares method
The Galerkin method
The collocation method
Comparison
Integration by parts
Weak form
Boundary function
Abstract notation for variational formulations
Variational problems and optimization of functionals
Examples on variational formulations
Variable coefficient
First-order derivative in the equation and boundary condition
Nonlinear coefficient
Computing with Dirichlet and Neumann conditions
When the numerical method is exact
Computing with finite elements
Finite element mesh and basis functions
Computation in the global physical domain
Comparison with a finite difference discretization
Cellwise computations
The integral for the element matrix
The integral for the element vector
Detailed calculations of the element matrix and vector
Contributions from the first and last cell
Assembly
Boundary conditions: specified nonzero value
General construction of a boundary function
Example on computing with finite element-based a boundary function
Computations in physical coordinates
Cellwise computations on the reference element
Modification of the linear system
Computations in the physical system
Symmetric modification of the linear system
Modification of the element matrix and vector
Boundary conditions: specified derivative
The variational formulation
Boundary term vanishes because of the test functions
Boundary term vanishes because of linear system modifications
Direct computation of the global linear system
Cellwise computations
Implementation
Global basis functions
Example: constant right-hand side
Finite elements
Variational formulations in 2D and 3D
Transformation to a reference cell in 2D and 3D
Numerical integration
Convenient formulas for P1 elements in 2D
Summary
Time-dependent problems
Discretization in time by a Forward Euler scheme
Time discretization
Space discretization
Variational forms
Simplified notation for the solution at recent time levels
Deriving the linear systems
Computational algorithm
Comparing P1 elements with the finite difference method
Lumping the mass matrix
Discretization in time by a Backward Euler scheme
Time discretization
Variational forms
Linear systems
Dirichlet boundary conditions
Boundary function
Finite element basis functions
Modification of the linear system
Example: Oscillating Dirichlet boundary condition
Analysis of the discrete equations
Forward Euler discretization
Backward Euler discretization
Comparing amplification factors
Systems of differential equations
Variational forms
A worked example
Identical function spaces for the unknowns
Variational form of each individual PDE
Compound scalar variational form
Decoupled linear systems
Coupled linear systems
Different function spaces for the unknowns
Computations in 1D
Exercises
Exercise 23: Refactor functions into a more general class
Exercise 24: Compute the deflection of a cable with sine functions
Exercise 25: Check integration by parts
Exercise 26: Compute the deflection of a cable with 2 P1 elements
Exercise 27: Compute the deflection of a cable with 1 P2 element
Exercise 28: Compute the deflection of a cable with a step load
Exercise 29: Show equivalence between linear systems
Exercise 30: Compute with a non-uniform mesh
Problem 31: Solve a 1D finite element problem by hand
Exercise 32: Compare finite elements and differences for a radially symmetric Poisson equation
Exercise 33: Compute with variable coefficients and P1 elements by hand
Exercise 34: Solve a 2D Poisson equation using polynomials and sines
Exercise 35: Analyze a Crank-Nicolson scheme for the diffusion equation
Bibliography
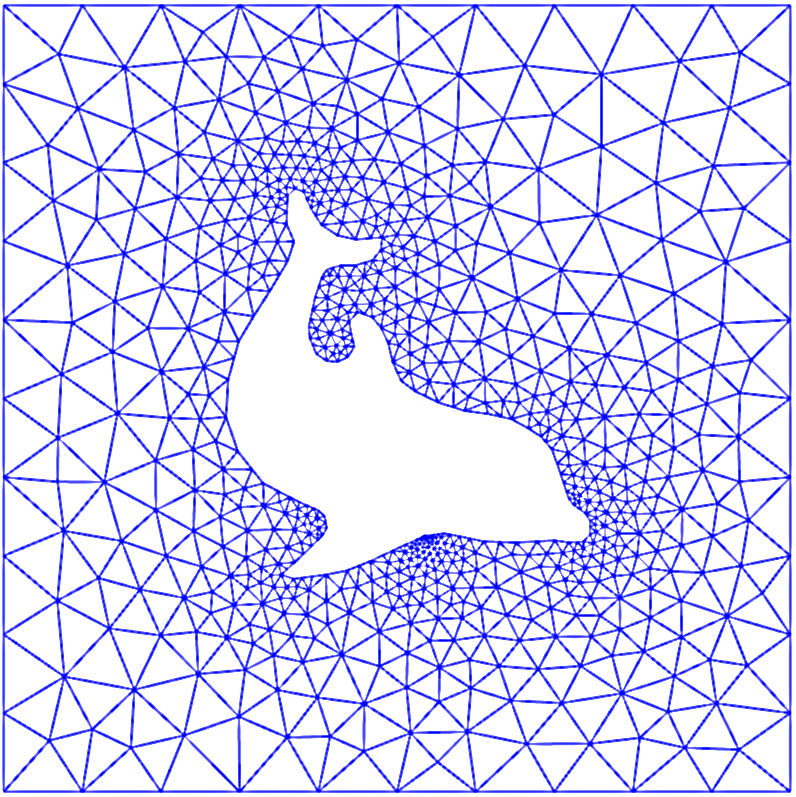
The finite element method is a powerful tool for solving differential equations. The method can easily deal with complex geometries and higher-order approximations of the solution. Figure 1 shows a two-dimensional domain with a non-trivial geometry. The idea is to divide the domain into triangles (elements) and seek a polynomial approximations to the unknown functions on each triangle. The method glues these piecewise approximations together to find a global solution. Linear and quadratic polynomials over the triangles are particularly popular.