

The purpose of this section is to demonstrate in detail how the finite element method can the be applied to the model problem
$$ -u''(x) = 2,\quad x\in (0,L),\ u(0)=u(L)=0,$$ with variational formulation
$$ (u',v') = (2,v)\quad\forall v\in V\tp $$ The variational formulation is derived in the section Integration by parts.
We introduce a finite element mesh with \( N_e \) cells, all with length \( h \), and number the cells from left to right. global nodes. Choosing P1 elements, there are two nodes per cell, and the coordinates of the nodes become
$$ \begin{equation*} \xno{i} = i h,\quad h=L/N_e,\quad i=0,\ldots,N_n=N_e+1, \end{equation*} $$ provided we number the nodes from left to right.
Each of the nodes, \( i \), is associated a finite element basis function
\( \basphi_i(x) \). When approximating a given function \( f \) by a finite
element function \( u \), we expand \( u \) using finite element basis
functions associated with all nodes in the mesh, i.e., \( N=N_n \).
However, when solving differential equations we will often have
\( N
$$
\begin{equation}
u(x) = \sum_{j\in\If} c_j\baspsi_j(x)\tp
\tag{72}
\end{equation}
$$
Because of the boundary conditions, we must demand
\( \baspsi_i(0)=\baspsi_i(L)=0 \), \( i\in\If \). When \( \baspsi_i \),
\( i=0,\ldots,N \), is to be selected among the finite element basis
functions \( \basphi_j \), \( i=0,\ldots,N_n \), we have to avoid using
\( \basphi_j \) functions that do not vanish at \( \xno{0}=0 \) and
\( \xno{N_n}=L \). However, all \( \basphi_j \) vanish at these two nodes for
\( j=1,\ldots,N_n \). Only basis functions associated with the end nodes,
\( \basphi_0 \) and \( \basphi_{N_n} \), violate the boundary conditions of
our differential equation. Therefore, we select the basis functions
\( \basphi_i \) to be the set of finite element basis functions associated
with all the interior nodes in the mesh:
$$ \baspsi_i=\basphi_{i+1},\quad i=0,\ldots,N\tp$$
Here, \( N=N_n-2 \).
In the general case, the nodes are not necessarily numbered from left
to right, so we introduce a mapping from the node numbering, or more
precisely the degree of freedom numbering, to the numbering of
the unknowns in the final equation system. These unknowns take on
the numbers \( 0,\ldots,N \). Unknown number \( j \) in the linear system
corresponds to degree of freedom number \( \nu (j) \), \( j\in\If \).
We can then write
$$ \baspsi_i=\basphi_{\nu(i)},\quad i=0,\ldots,N\tp$$
With a regular numbering as in the present example,
\( \nu(j) = j+1 \), \( j=1,\ldots,N=N_n-2 \).
We shall first perform a computation in the \( x \)
coordinate system because the integrals can be easily computed
here by simple, visual,
geometric considerations. This is called a global approach
since we work in the \( x \) coordinate system and compute integrals on
the global domain \( [0,L] \).
The entries in the coefficient matrix and right-hand side are
$$
\begin{equation*}
A_{i,j}=\int_0^L\baspsi_i'(x)\baspsi_j'(x) \dx,\quad
b_i=\int_0^L2\baspsi_i(x) \dx, \quad i,j\in\If\tp
\end{equation*}
$$
Expressed in terms of finite element basis functions \( \basphi_i \) we
get the alternative expressions
$$
\begin{equation*}
A_{i,j}=\int_0^L\basphi_{i+1}'(x)\basphi_{j+1}'(x) \dx,\quad
b_i=\int_0^L2\basphi_{i+1}(x) \dx,\quad i,j\in\If\tp
\end{equation*}
$$
For the following calculations the subscripts on the finite
element basis functions are more conveniently written as
\( i \) and \( j \) instead of \( i+1 \) and \( j+1 \), so our notation becomes
$$
\begin{equation*}
A_{i-1,j-1}=\int_0^L\basphi_{i}'(x)\basphi_{j}'(x) \dx,\quad
b_{i-1}=\int_0^L2\basphi_{i}(x) \dx,
\end{equation*}
$$
where the \( i \) and \( j \) indices run as \( i,j=1,\ldots,N_n-1=N+1 \).
The \( \basphi_i(x) \) function is a hat function with peak at \( x=\xno{i} \)
and a linear variation in \( [\xno{i-1},\xno{i}] \) and
\( [\xno{i},\xno{i+1}] \).
The derivative is \( 1/h \) to the left of \( \xno{i} \) and \( -1/h \) to
the right, or more formally,
$$
\begin{equation}
\basphi_i'(x) = \left\lbrace\begin{array}{ll}
0, & x < \xno{i-1},\\
h^{-1},
& \xno{i-1} \leq x < \xno{i},\\
-h^{-1},
& \xno{i} \leq x < \xno{i+1},\\
0, & x\geq \xno{i+1}
\end{array}
\right.
\tag{73}
\end{equation}
$$
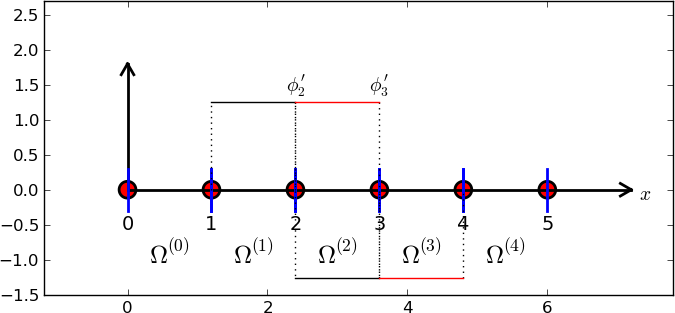
Figure 47 shows \( \basphi_1'(x) \) and \( \basphi_2'(x) \).
Figure 47: Illustration of the derivative of piecewise linear basis functions associated with nodes in cell 2.
We realize that \( \basphi_i' \) and \( \basphi_j' \) has no overlap, and hence their
product vanishes, unless \( i \) and \( j \) are nodes belonging to the same
cell. The only nonzero contributions to the coefficient matrix are
therefore
$$
\begin{align*}
A_{i-1,i-2} &=\int_0^L\basphi_i'(x) \basphi_{i-1}'(x) \dx,\\
A_{i-1,i-1}&=\int_0^L\basphi_{i}'(x)^2 \dx, \\
A_{i-1,i}&=\int_0^L\basphi_{i}'(x)\basphi_{i+1}'(x) \dx,
\end{align*}
$$
for \( i=1,\ldots,N_n-1 \), but for \( i=1 \), \( A_{i-1,i-2} \) is not defined,
and for \( i=N_n-1 \), \( A_{i-1,i} \) is not defined.
We see that \( \basphi_{i-1}'(x) \) and \( \basphi_i'(x) \) have overlap of one
cell \( \Omega^{(i-1)}=[\xno{i-1},\xno{i}] \) and that their product
then is \( -1/h^{2} \). The integrand is constant and therefore
\( A_{i-1,i-2}=-h^{-2}h=-h^{-1} \).
A similar reasoning can be applied to
\( A_{i-1,i} \), which also becomes \( -h^{-1} \). The integral of
\( \basphi_i'(x)^2 \) gets contributions from two cells,
\( \Omega^{(i-1)}=[\xno{i-1},\xno{i}] \) and
\( \Omega^{(i)}=[\xno{i},\xno{i+1}] \), but \( \basphi_i'(x)^2=h^{-2} \) in
both cells, and the length of the integration interval is \( 2h \) so
we get
\( A_{i-1,i-1}=2h^{-1} \).
The right-hand side involves an integral of \( 2\basphi_i(x) \),
\( i=1,\ldots,N_n-1 \),
which is just the area under a hat function of height 1 and width
\( 2h \), i.e., equal to \( h \). Hence, \( b_{i-1}=2h \).
To summarize the linear system, we switch from \( i \) to \( i+1 \) such that
we can write
$$ A_{i,i-1}=A_{i,i-1}=-h^{-1},\quad A_{i,i}=2h^{-1},\quad
b_i = 2h\tp$$
The equation system to be solved only involves the unknowns
\( c_i \) for \( i\in\If \). With our numbering of unknowns and
nodes, we have that \( c_i \) equals \( u(\xno{i+1}) \).
The complete matrix system that takes the following form:
$$
\begin{equation}
\frac{1}{h}\left(
\begin{array}{ccccccccc}
2 & -1 & 0
&\cdots &
\cdots & \cdots & \cdots &
\cdots & 0 \\
-1 & 2 & -1 & \ddots & & & & & \vdots \\
0 & -1 & 2 & -1 &
\ddots & & & & \vdots \\
\vdots & \ddots & & \ddots & \ddots & 0 & & & \vdots \\
\vdots & & \ddots & \ddots & \ddots & \ddots & \ddots & & \vdots \\
\vdots & & & 0 & -1 & 2 & -1 & \ddots & \vdots \\
\vdots & & & & \ddots & \ddots & \ddots &\ddots & 0 \\
\vdots & & & & &\ddots & \ddots &\ddots & -1 \\
0 &\cdots & \cdots &\cdots & \cdots & \cdots & 0 & -1 & 2
\end{array}
\right)
\left(
\begin{array}{c}
c_0 \\
\vdots\\
\vdots\\
\vdots \\
\vdots \\
\vdots \\
\vdots \\
\vdots\\
c_{N}
\end{array}
\right)
=
\left(
\begin{array}{c}
2h \\
\vdots\\
\vdots\\
\vdots \\
\vdots \\
\vdots \\
\vdots \\
\vdots\\
2h
\end{array}
\right)
\tag{74}
\end{equation}
$$
A typical row in the matrix system can be written as
$$
\begin{equation}
-\frac{1}{h}c_{i-1} + \frac{2}{h}c_{i} - \frac{1}{h}c_{i+1} = 2h\tp
\tag{75}
\end{equation}
$$
Let us introduce the notation \( u_j \) for the value of \( u \) at node \( j \):
\( u_j=u(\xno{j}) \) since we have the interpretation
\( u(\xno{j})=\sum_jc_j\basphi(\xno{j})=\sum_j c_j\delta_{ij}=c_j \).
The unknowns \( c_0,\ldots,c_N \) are \( u_1,\ldots,u_{N_n} \).
Shifting \( i \) with \( i+1 \) in (75) and inserting
\( u_i = c_{i-1} \), we get
$$
\begin{equation}
-\frac{1}{h}u_{i-1} + \frac{2}{h}u_{i} - \frac{1}{h}u_{i+1} = 2h,
\tag{76}
\end{equation}
$$
A finite difference discretization of \( -u''(x)=2 \) by a centered,
second-order finite difference approximation \( u''(x_i)\approx [D_x D_x u]_i \)
with \( \Delta x = h \)
yields
$$
\begin{equation}
-\frac{u_{i-1} - 2u_{i} + u_{i+1}}{h^2} = 2,
\end{equation}
$$
which is, in fact, equivalent to (76) if
(76) is divided by \( h \).
Therefore, the finite difference and the finite element method are
equivalent in this simple test problem.
Sometimes a finite element method generates the finite difference
equations on a uniform mesh, and sometimes the finite element method
generates equations that are different. The differences are modest,
but may influence the numerical quality of the solution significantly,
especially in time-dependent problems.
We now employ the cell by cell computational procedure where
an element matrix and vector are calculated for each cell and
assembled in the global linear system.
All integrals are mapped to the local reference coordinate system
\( X\in [-1,1] \).
In the present case, the matrix entries contain derivatives
with respect to \( x \),
$$
\begin{equation*}
A_{i-1,j-1}^{(e)}=\int_{\Omega^{(e)}} \basphi_i'(x)\basphi_j'(x) \dx
= \int_{-1}^1 \frac{d}{dx}\refphi_r(X)\frac{d}{dx}\refphi_s(X)
\frac{h}{2} \dX,
\end{equation*}
$$
where the global degree of freedom \( i \) is related to the local
degree of freedom \( r \) through \( i=q(e,r) \). Similarly,
\( j=q(e,s) \). The local degrees of freedom run as \( r,s=0,1 \) for a P1
element.
There are simple formulas for the basis functions \( \refphi_r(X) \) as
functions of \( X \).
However, we now
need to find the derivative of \( \refphi_r(X) \) with respect to \( x \).
Given
$$ \refphi_0(X)=\half(1-X),\quad\refphi_1(X)=\half(1+X), $$
we can easily compute \( d\refphi_r/ dX \):
$$
\frac{d\refphi_0}{dX} = -\half,\quad \frac{d\refphi_1}{dX} = \half\tp
$$
From the chain rule,
$$
\begin{equation}
\frac{d\refphi_r}{dx} = \frac{d\refphi_r}{dX}\frac{dX}{dx}
= \frac{2}{h}\frac{d\refphi_r}{dX}\tp \end{equation}
$$
The transformed integral is then
$$
\begin{equation*}
A_{i-1,j-1}^{(e)}=\int_{\Omega^{(e)}} \basphi_i'(x)\basphi_j'(x) \dx
= \int_{-1}^1 \frac{2}{h}\frac{d\refphi_r}{dX}\frac{2}{h}\frac{d\refphi_s}{dX}
\frac{h}{2} \dX
\tp
\end{equation*}
$$
The right-hand side is transformed according to
$$
\begin{equation*}
b_{i-1}^{(e)} = \int_{\Omega^{(e)}} 2\basphi_i(x) \dx =
\int_{-1}^12\refphi_r(X)\frac{h}{2} \dX,\quad i=q(e,r),\ r=0,1
\tp
\end{equation*}
$$
Specifically for P1 elements we arrive at the following calculations for
the element matrix entries:
$$
\begin{align*}
\tilde A_{0,0}^{(e)} &= \int_{-1}^1\frac{2}{h}\left(-\half\right)
\frac{2}{h}\left(-\half\right)\frac{2}{h} \dX = \frac{1}{h}\\
\tilde A_{0,1}^{(e)} &= \int_{-1}^1\frac{2}{h}\left(-\half\right)
\frac{2}{h}\left(\half\right)\frac{2}{h} \dX = -\frac{1}{h}\\
\tilde A_{1,0}^{(e)} &= \int_{-1}^1\frac{2}{h}\left(\half\right)
\frac{2}{h}\left(-\half\right)\frac{2}{h} \dX = -\frac{1}{h}\\
\tilde A_{1,1}^{(e)} &= \int_{-1}^1\frac{2}{h}\left(\half\right)
\frac{2}{h}\left(\half\right)\frac{2}{h} \dX = \frac{1}{h}
\end{align*}
$$
The element vector entries become
$$
\begin{align*}
\tilde b_0^{(e)} &= \int_{-1}^12\half(1-X)\frac{h}{2} \dX = h\\
\tilde b_1^{(e)} &= \int_{-1}^12\half(1+X)\frac{h}{2} \dX = h\tp
\end{align*}
$$
Expressing these entries in matrix and vector notation, we have
$$
\begin{equation}
\tilde A^{(e)} =\frac{1}{h}\left(\begin{array}{rr}
1 & -1\\
-1 & 1
\end{array}\right),\quad
\tilde b^{(e)} = h\left(\begin{array}{c}
1\\
1
\end{array}\right)\tp
\tag{77}
\end{equation}
$$
The first and last cell involve only one unknown and one basis function
because of the Dirichlet boundary conditions at the first and last
node.
The element matrix therefore becomes a \( 1\times 1 \) matrix and there
is only one entry in the element vector. On cell 0, only \( \baspsi_0=\basphi_1 \)
is involved, corresponding to integration with \( \refphi_1 \). On cell \( N_e \),
only \( \baspsi_N=\basphi_{N_n-1} \) is involved, corresponding to
integration with \( \refphi_0 \).
We then get the special end-cell contributions
$$
\begin{equation}
\tilde A^{(e)} =\frac{1}{h}\left(\begin{array}{r}
1
\end{array}\right),\quad
\tilde b^{(e)} = h\left(\begin{array}{c}
1
\end{array}\right),
\tag{93}
\end{equation}
$$
for \( e=0 \) and \( e=N_e \). In these cells, we have only one degree of
freedom, not two as in the interior cells.
The next step is to assemble the contributions from the various cells.
The assembly of an element matrix and vector into the global matrix
and right-hand side can be expressed as
$$
A_{q(e,r),q(e,s)} = A_{q(e,r),q(e,s)} + \tilde A^{(e)}_{r,s},\quad
b_{q(e,r)} = b_{q(e,r)} + \tilde b^{(e)}_{r},\quad
$$
for \( r \) and \( s \) running over all local degrees of freedom in cell \( e \).
To make the assembly algorithm more precise, it is convenient to set up
Python data structures and a code snippet for carrying out all details
of the algorithm.
For a mesh of four equal-sized P1 elements and \( L=2 \) we have
The total number of degrees of freedom is 3, being the function
values at the internal 3 nodes where \( u \) is unknown.
In cell 0 we have global degree of freedom 0, the next
cell has \( u \) unknown at its two nodes, which become
global degrees of freedom 0 and 1, and so forth according to
the
Assume all element matrices are stored in a list
The general case with
Carrying out the assembly results in a linear system that is identical
to (74), which is not surprising since
the procedures is mathematically equivalent to the calculations
in the physical domain.
A fundamental problem with the matrix system we have assembled is that
the boundary conditions are not incorporated if \( u(0) \) or \( u(L) \)
are different from zero. The next sections deals with this issue.
Computation in the global physical domain
Comparison with a finite difference discretization
Cellwise computations
The integral for the element matrix
The integral for the element vector
Detailed calculations of the element matrix and vector
Contributions from the first and last cell
Assembly
vertices = [0, 0.5, 1, 1.5, 2]
cells = [[0, 1], [1, 2], [2, 3], [3, 4]]
dof_map = [[0], [0, 1], [1, 2], [2]]
dof_map list. The mathematical \( q(e,r) \) quantity is nothing
but the dof_map list.
Ae such that
Ae[e][i,j] is \( \tilde A_{i,j}^{(e)} \). A corresponding list
for the element vectors is named be, where be[e][r] is
\( \tilde b_r^{(e)} \).
A Python code snippet
illustrates all details of the assembly algorithm:
# A[i,j]: coefficient matrix, b[i]: right-hand side
for e in range(len(Ae)):
for r in range(Ae[e].shape[0]):
for s in range(Ae[e].shape[1]):
A[dof_map[e,r],dof_map[e,s]] += Ae[e][i,j]
b[dof_map[e,r]] += be[e][i,j]
N_e P1 elements of length h has
N_n = N_e + 1
vertices = [i*h for i in range(N_n)]
cells = [[e, e+1] for e in range(N_e)]
dof_map = [[0]] + [[e-1, e] for i in range(1, N_e)] + [[N_n-2]]