The approximate function automates the steps in the previous slide:
approximate
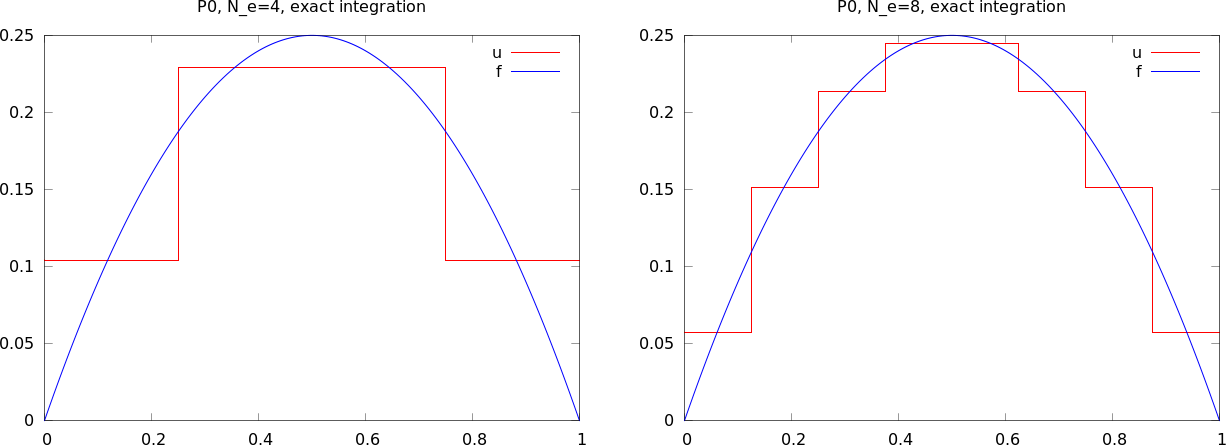
from fe_approx1D_numint import * x=sp.Symbol("x") for N_e in 4, 8: approximate(x*(1-x), d=0, N_e=N_e, Omega=[0,1])