Model extensions
Extension to a variable coefficient; Forward and Backward Euler
Extension to a variable coefficient; Crank-Nicolson
Extension to a variable coefficient; \( \theta \)-rule
Extension to a variable coefficient; operator notation
Extension to a source term
Implementation of the generalized model problem
Implementations of variable coefficients; functions
Implementations of variable coefficients; classes
Implementations of variable coefficients; lambda function
Verification via trivial solutions
Verification via trivial solutions; test function
Verification via manufactured solutions
Linear manufactured solution
Test function for linear manufactured solution
Computing convergence rates
Estimating the convergence rate \( r \)
Brief implementation
We embed the code in a real test function
The manufactured solution can be computed by sympy
Execution
Debugging via convergence rates
Extension to systems of ODEs
The Backward Euler method gives a system of algebraic equations
Methods for general first-order ODEs
Generic form
The \( \theta \)-rule
Implicit 2-step backward scheme
The Leapfrog scheme
The filtered Leapfrog scheme
2nd-order Runge-Kutta scheme
4th-order Runge-Kutta scheme
2nd-order Adams-Bashforth scheme
3rd-order Adams-Bashforth scheme
The Odespy software
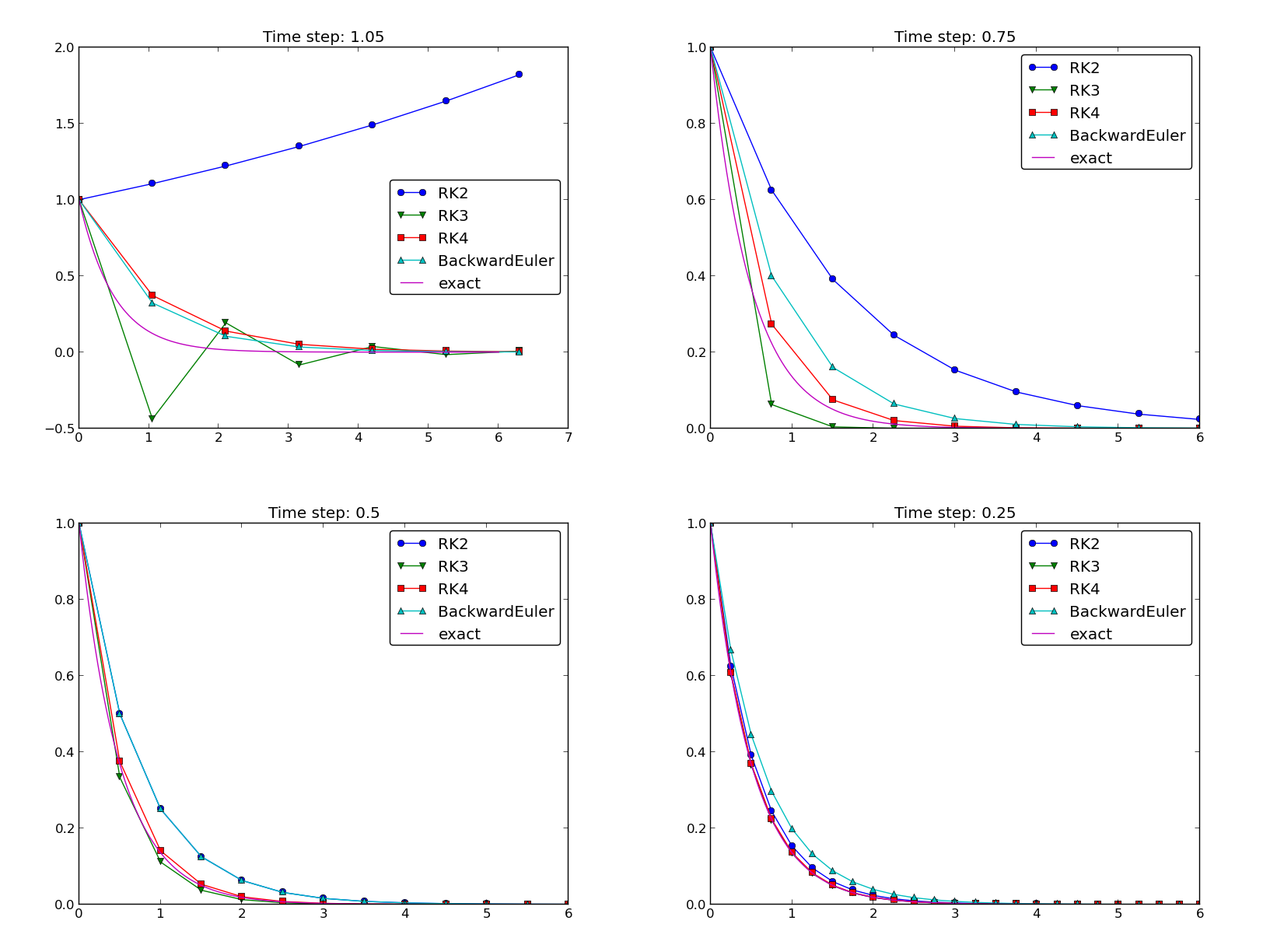
Example: Runge-Kutta methods
Plots from the experiments
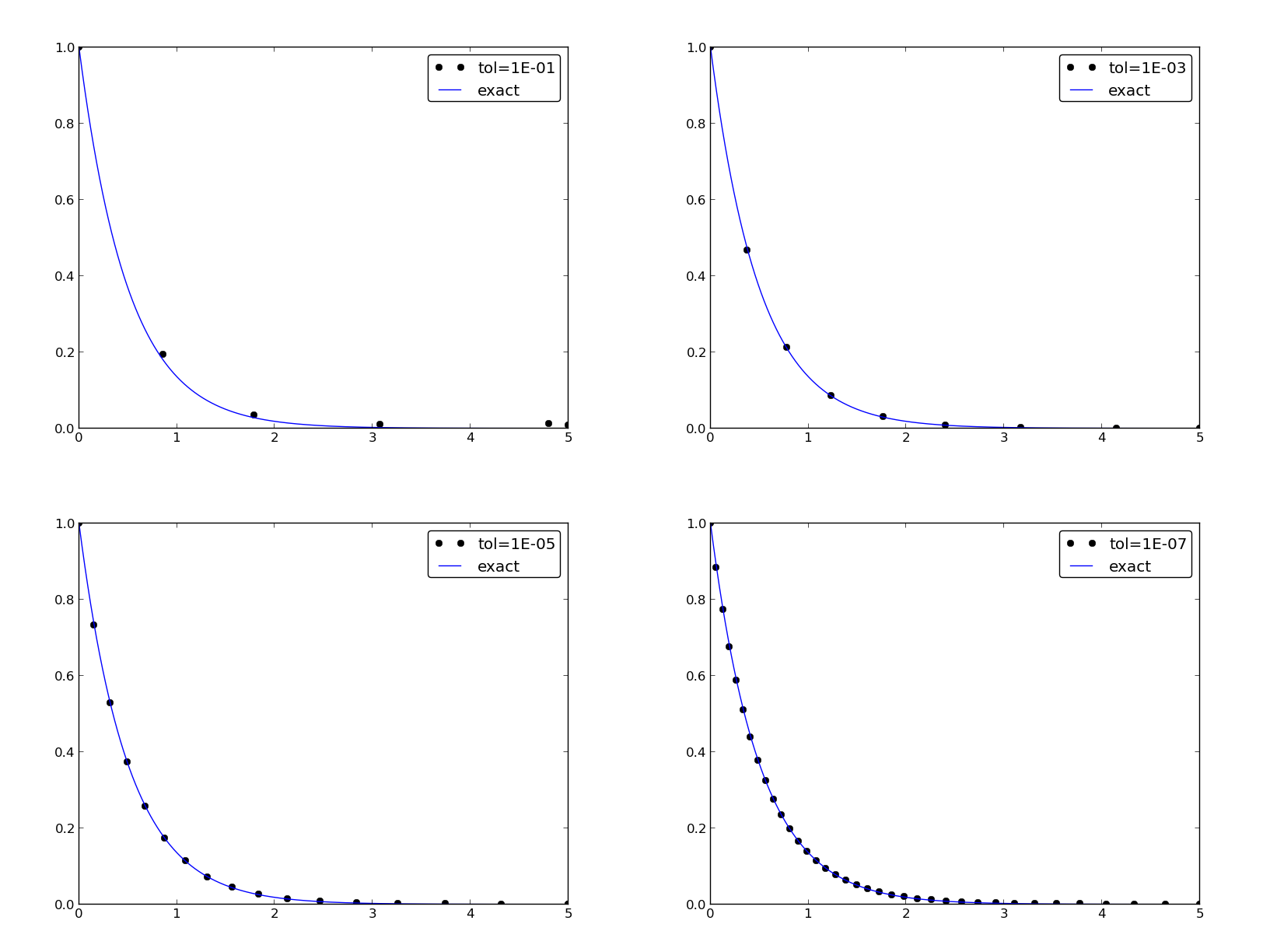
Example: Adaptive Runge-Kutta methods
The Forward Euler scheme: $$ \begin{equation} \frac{u^{n+1} - u^n}{\Delta t} = -a(t_n)u^n \label{_auto1} \end{equation} $$
The Backward Euler scheme: $$ \begin{equation} \frac{u^{n} - u^{n-1}}{\Delta t} = -a(t_n)u^n \label{_auto2} \end{equation} $$
Eevaluting \( a(t_{n+\half}) \) and using an average for \( u \): $$ \begin{equation} \frac{u^{n+1} - u^{n}}{\Delta t} = -a(t_{n+\half})\half(u^n + u^{n+1}) \label{_auto3} \end{equation} $$
Using an average for \( a \) and \( u \): $$ \begin{equation} \frac{u^{n+1} - u^{n}}{\Delta t} = -\half(a(t_n)u^n + a(t_{n+1})u^{n+1}) \label{_auto4} \end{equation} $$
The \( \theta \)-rule unifies the three mentioned schemes, $$ \begin{equation} \frac{u^{n+1} - u^{n}}{\Delta t} = -a((1-\theta)t_n + \theta t_{n+1})((1-\theta) u^n + \theta u^{n+1}) \label{_auto5} \end{equation} $$ or, $$ \begin{equation} \frac{u^{n+1} - u^{n}}{\Delta t} = -(1-\theta) a(t_n)u^n - \theta a(t_{n+1})u^{n+1} \label{_auto6} \end{equation} $$
Implementation where \( a(t) \) and \( b(t) \) are given as Python functions (see file decay_vc.py):
def solver(I, a, b, T, dt, theta):
"""
Solve u'=-a(t)*u + b(t), u(0)=I,
for t in (0,T] with steps of dt.
a and b are Python functions of t.
"""
dt = float(dt) # avoid integer division
Nt = int(round(T/dt)) # no of time intervals
T = Nt*dt # adjust T to fit time step dt
u = zeros(Nt+1) # array of u[n] values
t = linspace(0, T, Nt+1) # time mesh
u[0] = I # assign initial condition
for n in range(0, Nt): # n=0,1,...,Nt-1
u[n+1] = ((1 - dt*(1-theta)*a(t[n]))*u[n] + \
dt*(theta*b(t[n+1]) + (1-theta)*b(t[n])))/\
(1 + dt*theta*a(t[n+1]))
return u, t
Plain functions:
def a(t):
return a_0 if t < tp else k*a_0
def b(t):
return 1
Better implementation: class with the parameters a0, tp, and k
as attributes and a special method __call__ for evaluating \( a(t) \):
class A:
def __init__(self, a0=1, k=2):
self.a0, self.k = a0, k
def __call__(self, t):
return self.a0 if t < self.tp else self.k*self.a0
a = A(a0=2, k=1) # a behaves as a function a(t)
Quick writing: a one-liner lambda function
a = lambda t: a_0 if t < tp else k*a_0
In general,
f = lambda arg1, arg2, ...: expressin
is equivalent to
def f(arg1, arg2, ...):
return expression
One can use lambda functions directly in calls:
u, t = solver(1, lambda t: 1, lambda t: 1, T, dt, theta)
for a problem \( u'=-u+1 \), \( u(0)=1 \).
A lambda function can appear anywhere where a variable can appear.
def test_constant_solution():
"""
Test problem where u=u_const is the exact solution, to be
reproduced (to machine precision) by any relevant method.
"""
def u_exact(t):
return u_const
def a(t):
return 2.5*(1+t**3) # can be arbitrary
def b(t):
return a(t)*u_const
u_const = 2.15
theta = 0.4; I = u_const; dt = 4
Nt = 4 # enough with a few steps
u, t = solver(I=I, a=a, b=b, T=Nt*dt, dt=dt, theta=theta)
print u
u_e = u_exact(t)
difference = abs(u_e - u).max() # max deviation
tol = 1E-14
assert difference < tol
\( u^n = ct_n+I \) fulfills the discrete equations!
First, $$ \begin{align} \lbrack D_t^+ t\rbrack^n &= \frac{t_{n+1}-t_n}{\Delta t}=1, \label{decay:fd2:Dop:tn:fw}\\ \lbrack D_t^- t\rbrack^n &= \frac{t_{n}-t_{n-1}}{\Delta t}=1, \label{decay:fd2:Dop:tn:bw}\\ \lbrack D_t t\rbrack^n &= \frac{t_{n+\half}-t_{n-\half}}{\Delta t}=\frac{(n+\half)\Delta t - (n-\half)\Delta t}{\Delta t}=1\label{decay:fd2:Dop:tn:cn} \end{align} $$
Forward Euler: $$ [D^+ u = -au + b]^n $$
\( a^n=a(t_n) \), \( b^n=c + a(t_n)(ct_n + I) \), and \( u^n=ct_n + I \) results in $$ c = -a(t_n)(ct_n+I) + c + a(t_n)(ct_n + I) = c $$
def test_linear_solution():
"""
Test problem where u=c*t+I is the exact solution, to be
reproduced (to machine precision) by any relevant method.
"""
def u_exact(t):
return c*t + I
def a(t):
return t**0.5 # can be arbitrary
def b(t):
return c + a(t)*u_exact(t)
theta = 0.4; I = 0.1; dt = 0.1; c = -0.5
T = 4
Nt = int(T/dt) # no of steps
u, t = solver(I=I, a=a, b=b, T=Nt*dt, dt=dt, theta=theta)
u_e = u_exact(t)
difference = abs(u_e - u).max() # max deviation
print difference
tol = 1E-14 # depends on c!
assert difference < tol
Frequent assumption on the relation between the numerical error \( E \) and some discretization parameter \( \Delta t \): $$ \begin{equation} E = C\Delta t^r, \label{decay:E:dt} \end{equation} $$
Perform numerical experiments: \( (\Delta t_i, E_i) \), \( i=0,\ldots,m-1 \). Two methods for finding \( r \) (and \( C \)):
Method 2 is best.
Compute \( r_0, r_1, \ldots, r_{m-2} \) from \( E_i \) and \( \Delta t_i \):
def compute_rates(dt_values, E_values):
m = len(dt_values)
r = [log(E_values[i-1]/E_values[i])/
log(dt_values[i-1]/dt_values[i])
for i in range(1, m, 1)]
# Round to two decimals
r = [round(r_, 2) for r_ in r]
return r
def test_convergence_rates():
# Create a manufactured solution
# define u_exact(t), a(t), b(t)
dt_values = [0.1*2**(-i) for i in range(7)]
I = u_exact(0)
for theta in (0, 1, 0.5):
E_values = []
for dt in dt_values:
u, t = solver(I=I, a=a, b=b, T=6, dt=dt, theta=theta)
u_e = u_exact(t)
e = u_e - u
E = sqrt(dt*sum(e**2))
E_values.append(E)
r = compute_rates(dt_values, E_values)
print 'theta=%g, r: %s' % (theta, r)
expected_rate = 2 if theta == 0.5 else 1
tol = 0.1
diff = abs(expected_rate - r[-1])
assert diff < tol
We choose \( \uex(t) = \sin(t)e^{-2t} \), \( a(t)=t^2 \), fit \( b(t)=u'(t)-a(t) \):
# Create a manufactured solution with sympy
import sympy as sym
t = sym.symbols('t')
u_exact = sym.sin(t)*sym.exp(-2*t)
a = t**2
b = sym.diff(u_exact, t) + a*u_exact
# Turn sympy expressions into Python function
u_exact = sym.lambdify([t], u_exact, modules='numpy')
a = sym.lambdify([t], a, modules='numpy')
b = sym.lambdify([t], b, modules='numpy')
Complete code: decay_vc.py.
Terminal> python decay_vc.py
...
theta=0, r: [1.06, 1.03, 1.01, 1.01, 1.0, 1.0]
theta=1, r: [0.94, 0.97, 0.99, 0.99, 1.0, 1.0]
theta=0.5, r: [2.0, 2.0, 2.0, 2.0, 2.0, 2.0]
Potential bug: missing a in the denominator,
u[n+1] = (1 - (1-theta)*a*dt)/(1 + theta*dt)*u[n]
Running decay_convrate.py gives same rates.
Why? The value of \( a \)... (\( a=1 \))
0 and 1 are bad values in tests!
Better:
Terminal> python decay_convrate.py --a 2.1 --I 0.1 \
--dt 0.5 0.25 0.1 0.05 0.025 0.01
...
Pairwise convergence rates for theta=0:
1.49 1.18 1.07 1.04 1.02
Pairwise convergence rates for theta=0.5:
-1.42 -0.22 -0.07 -0.03 -0.01
Pairwise convergence rates for theta=1:
0.21 0.12 0.06 0.03 0.01
Forward Euler works...because \( \theta=0 \) hides the bug.
This bug gives \( r\approx 0 \):
u[n+1] = ((1-theta)*a*dt)/(1 + theta*dt*a)*u[n]
Sample system: $$ \begin{align} u' &= a u + bv \label{_auto8}\\ v' &= cu + dv \label{_auto9} \end{align} $$
The Forward Euler method: $$ \begin{align} u^{n+1} &= u^n + \Delta t (a u^n + b v^n) \label{_auto10}\\ v^{n+1} &= u^n + \Delta t (cu^n + dv^n) \label{_auto11} \end{align} $$
The Backward Euler scheme: $$ \begin{align} u^{n+1} &= u^n + \Delta t (a u^{n+1} + b v^{n+1}) \label{_auto12}\\ v^{n+1} &= v^n + \Delta t (c u^{n+1} + d v^{n+1}) \label{_auto13} \end{align} $$ which is a \( 2\times 2 \) linear system: $$ \begin{align} (1 - \Delta t a)u^{n+1} + bv^{n+1} &= u^n \label{_auto14}\\ c u^{n+1} + (1 - \Delta t d) v^{n+1} &= v^n \label{_auto15} \end{align} $$
Crank-Nicolson also gives a \( 2\times 2 \) linear system.
The standard form for ODEs: $$ \begin{equation} u' = f(u,t),\quad u(0)=I \label{decay:ode:general} \end{equation} $$
\( u \) and \( f \): scalar or vector.
Vectors in case of ODE systems: $$ u(t) = (u^{(0)}(t),u^{(1)}(t),\ldots,u^{(m-1)}(t)) $$ $$ \begin{align*} f(u, t) = ( & f^{(0)}(u^{(0)},\ldots,u^{(m-1)})\\ & f^{(1)}(u^{(0)},\ldots,u^{(m-1)}),\\ & \vdots\\ & f^{(m-1)}(u^{(0)}(t),\ldots,u^{(m-1)}(t))) \end{align*} $$
Scheme: $$ u^{n+1} = \frac{4}{3}u^n - \frac{1}{3}u^{n-1} + \frac{2}{3}\Delta t f(u^{n+1}, t_{n+1}) \label{decay:fd2:bw:2step} $$ Nonlinear equation for \( u^{n+1} \).
Idea: $$ \begin{equation} u'(t_n)\approx \frac{u^{n+1}-u^{n-1}}{2\Delta t} = [D_{2t} u]^n \label{_auto17} \end{equation} $$
Scheme: $$ [D_{2t} u = f(u,t)]^n$$ or written out, $$ \begin{equation} u^{n+1} = u^{n-1} + 2 \Delta t f(u^n, t_n) \label{decay:fd2:leapfrog} \end{equation} $$
After computing \( u^{n+1} \), stabilize Leapfrog by $$ \begin{equation} u^n\ \leftarrow\ u^n + \gamma (u^{n-1} - 2u^n + u^{n+1}) \label{decay:fd2:leapfrog:filtered} \end{equation} $$
Forward-Euler + approximate Crank-Nicolson: $$ \begin{align} u^* &= u^n + \Delta t f(u^n, t_n), \label{decay:fd2:RK2:s1}\\ u^{n+1} &= u^n + \Delta t \half \left( f(u^n, t_n) + f(u^*, t_{n+1}) \right) \label{decay:fd2:RK2:s2} \end{align} $$
Odespy features simple Python implementations of the most fundamental schemes as well as Python interfaces to several famous packages for solving ODEs: ODEPACK, Vode, rkc.f, rkf45.f, Radau5, as well as the ODE solvers in SciPy, SymPy, and odelab.
Typical usage:
# Define right-hand side of ODE
def f(u, t):
return -a*u
import odespy
import numpy as np
# Set parameters and time mesh
I = 1; a = 2; T = 6; dt = 1.0
Nt = int(round(T/dt))
t_mesh = np.linspace(0, T, Nt+1)
# Use a 4th-order Runge-Kutta method
solver = odespy.RK4(f)
solver.set_initial_condition(I)
u, t = solver.solve(t_mesh)
solvers = [odespy.RK2(f),
odespy.RK3(f),
odespy.RK4(f),
odespy.BackwardEuler(f, nonlinear_solver='Newton')]
for solver in solvers:
solver.set_initial_condition(I)
u, t = solver.solve(t)
# + lots of plot code...
The 4-th order Runge-Kutta method (RK4) is the method of choice!
ode45).