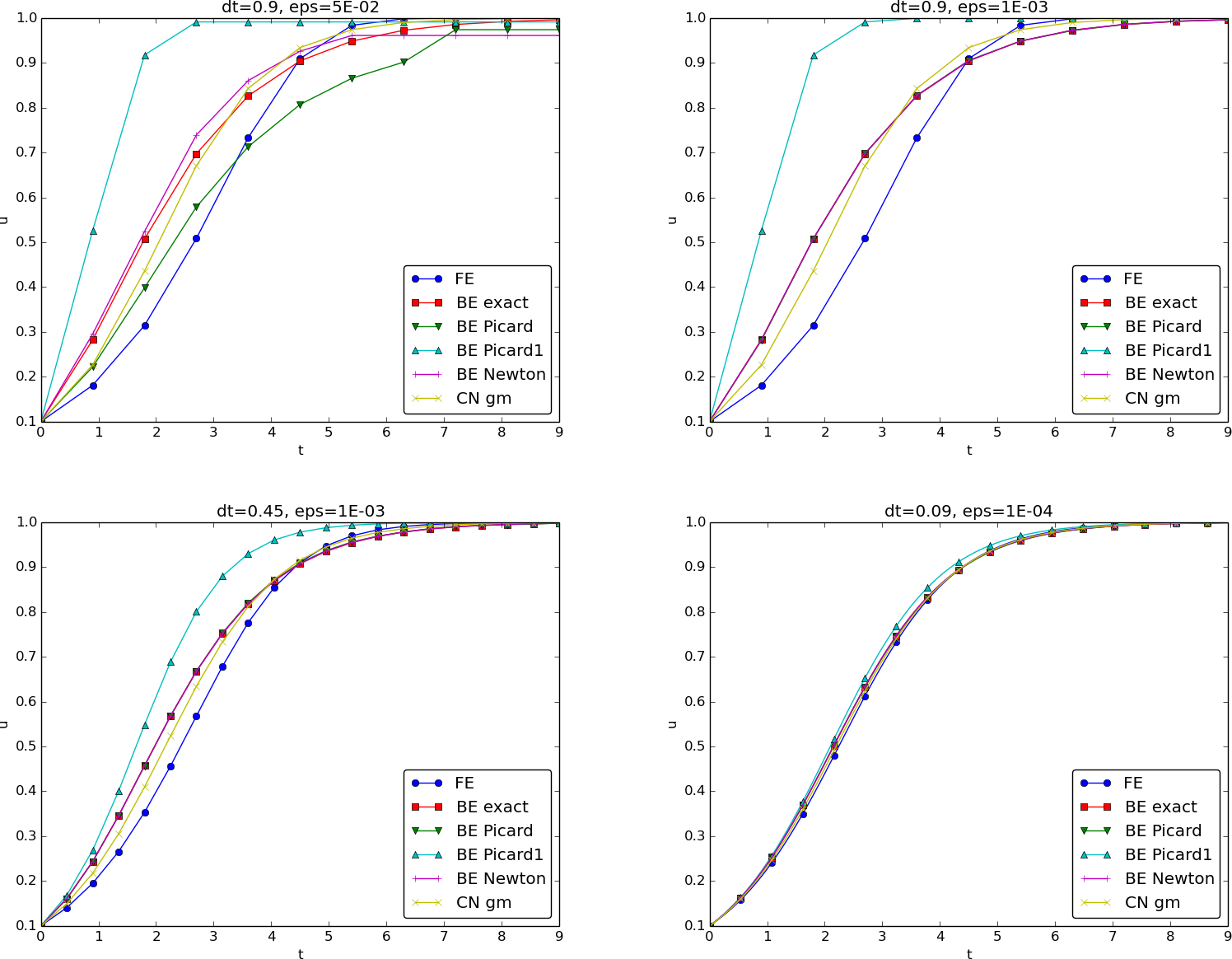
Experiments: accuracy of iteration methods
Figure 1: The impact of solution strategies and for four different time step lengths on the solution.
Linear ODE:
$$ u^{\prime} (t) = a(t)u(t) + b(t)$$
Nonlinear ODE:
$$ u^{\prime}(t) = u(t)(1 - u(t)) = u(t) - {\color{red}u(t)^2}$$
This (pendulum) ODE is also nonlinear:
$$ u^{\prime\prime} + \gamma\sin u = 0$$
because
$$ \sin u = u - \frac{1}{6}u^3 + \Oof{u^5},$$
contains products of \( u \)
$$ u^{\prime}(t) = u(t)(1 - u(t)) = u - {\color{red}u^2}$$
Forward Euler method:
$$ \frac{u^{n+1} - u^n}{\Delta t} = u^n(1 - u^n)$$
gives a linear algebraic equation for the unknown value \( u^{n+1} \)!
Explicit time integration methods will (normally) linearize a nonlinear problem.
Another example: 2nd-order Runge-Kutta method
$$
\begin{align*}
u^* &= u^n + \Delta t u^n(1 - u^n),\\
u^{n+1} &= u^n + \Delta t \half \left(
u^n(1 - u^n) + u^*(1 - u^*))
\right)\tp
\end{align*}
$$
A backward time difference
$$ \frac{u^{n} - u^{n-1}}{\Delta t} = u^n(1 - u^n) $$
gives a nonlinear algebraic equation for the unknown \( u^n \). The equation is of quadratic type (which can easily be solved exactly):
$$ \Delta t (u^n)^2 + (1-\Delta t)u^n - u^{n-1} = 0 $$
To make formulas less overloaded and the mathematics as close as possible to computer code, a new notation is introduced:
Nonlinear equation to solve in new notation:
$$
F(u) = \Delta t u^2 + (1-\Delta t)u - u^{(1)} = 0
$$
Solution of \( F(u)=0 \):
$$
u = \frac{1}{2\Delta t}
\left(-1+\Delta t \pm \sqrt{(1-\Delta t)^2 - 4\Delta t u^{(1)}}\right)
$$
Nonlinear algebraic equations may have multiple solutions!
Let's investigate the nature of the two roots:
>>> import sympy as sp
>>> dt, u_1, u = sp.symbols('dt u_1 u')
>>> r1, r2 = sp.solve(dt*u**2 + (1-dt)*u - u_1, u) # find roots
>>> r1
(dt - sqrt(dt**2 + 4*dt*u_1 - 2*dt + 1) - 1)/(2*dt)
>>> r2
(dt + sqrt(dt**2 + 4*dt*u_1 - 2*dt + 1) - 1)/(2*dt)
>>> print r1.series(dt, 0, 2)
-1/dt + 1 - u_1 + dt*(u_1**2 - u_1) + O(dt**2)
>>> print r2.series(dt, 0, 2)
u_1 + dt*(-u_1**2 + u_1) + O(dt**2)
The r1 root behaves as \( 1/\Delta t\rightarrow\infty \)
as \( \Delta t\rightarrow 0 \)! Therefore, only the r2 root is of
relevance.
Examples will illustrate the points!
Nonliner equation from Backward Euler scheme for logistic ODE:
$$ F(u) = au^2 + bu + c = 0$$
Let \( u^{-} \) be an available approximation of the unknown \( u \).
Linearization of \( u^2 \): \( u^{-}u \)
$$ F(u)\approx\hat F(u) = au^{-}u + bu + c = 0$$
But
At a time level, set \( u^{-}=u^{(1)} \) (solution at previous time level) and iterate:
$$ u = -\frac{c}{au^{-} + b},\quad u^{-}\ \leftarrow\ u$$
This technique is known as
$$ au^k u^{k+1} + bu^{k+1} + c = 0\quad\Rightarrow\quad u^{k+1}
= -\frac{c}{au^k + b},\quad k=0,1,\ldots$$
Or with a time level \( n \) too:
$$ au^{n,k} u^{n,k+1} + bu^{n,k+1} - u^{n-1} = 0\quad\Rightarrow\quad u^{n,k+1}
= \frac{u^{n-1}}{au^{n,k} + b},\quad k=0,1,\ldots$$
Using change in solution:
$$ |u - u^{-}| \leq\epsilon_u$$
or change in residual:
$$ |F(u)|= |au^2+bu + c| < \epsilon_r$$
Common simple and cheap technique: perform 1 single Picard iteration
$$
\frac{u^{n} - u^{n-1}}{\Delta t} = u^n(1 - {\color{red}u^{n-1}})
$$
Inconsistent time discretization (\( u(1-u) \) must be evaluated for \( n \), \( n-1 \), or \( n-\frac{1}{2} \)) - can produce quite inaccurate results, but is very popular.
Crank-Nicolson discretization:
$$ [D_t u = u(1-u)]^{n+\half}$$
$$
\frac{u^{n+1}-u^n}{\Delta t} = u^{n+\half} -
(u^{n+\half})^2
$$
Approximate \( u^{n+\half} \) as usual by an arithmetic mean,
$$ u^{n+\half}\approx \half(u^n + u^{n+1})$$
$$ (u^{n+\half})^2\approx \frac{1}{4}(u^n + u^{n+1})^2\quad\hbox{(nonlinear term)}$$
which is nonlinear in the unknown \( u^{n+1} \).
Using a geometric mean for \( (u^{n+\half})^2 \) linearizes the nonlinear term \( (u^{n+\half})^2 \) (error \( \Oof{\Delta t^2} \) as in the discretization of \( u^{\prime} \)):
$$ (u^{n+\half})^2\approx u^nu^{n+1}$$
Arithmetic mean on the linear \( u^{n+\frac{1}{2}} \) term and a geometric mean for \( (u^{n+\half})^2 \) gives a linear equation for \( u^{n+1} \):
$$ \frac{{\color{red}u^{n+1}}-u^n}{\Delta t} =
\half(u^n + {\color{red}u^{n+1}}) + u^n{\color{red}u^{n+1}}$$
Note: Here we turned a nonlinear algebraic equation into a linear one. No need for iteration! (Consistent \( \Oof{\Delta t^2} \) approx.)
Write the nonlinear algebraic equation as
$$ F(u) = 0 $$
Newton's method: linearize \( F(u) \) by two terms from the Taylor series,
$$
\begin{align*}
F(u) &= F(u^{-}) + F^{\prime}(u^{-})(u - u^{-}) + {\half}F^{\prime\prime}(u^{-})(u-u^{-})^2
+\cdots\\
& \approx F(u^{-}) + F^{\prime}(u^{-})(u - u^{-}) \equiv \hat F(u)
\end{align*}
$$
The linear equation \( \hat F(u)=0 \) has the solution
$$ u = u^{-} - \frac{F(u^{-})}{F^{\prime}(u^{-})}$$
Note that \( \hat F \) in Picard and Newton are different!
$$ u^{k+1} = u^k - \frac{F(u^k)}{F^{\prime}(u^k)},\quad k=0,1,\ldots$$
Newton's method exhibits quadratic convergence if \( u^k \) is sufficiently close to the solution. Otherwise, the method may diverge.
$$ F(u) = au^2 + bu + c$$
$$ F^{\prime}(u) = 2au + b$$
The iteration method becomes
$$
u = u^{-} + \frac{a(u^{-})^2 + bu^{-} + c}{2au^{-} + b},\quad
u^{-}\ \leftarrow u
$$
Start of iteration: \( u^{-}=u^{(1)} \)
Set iteration start as \( u^{n,0}= u^{n-1} \) and iterate with explicit indices for time (\( n \)) and Newton iteration (\( k \)):
$$
u^{n,k+1} = u^{n,k} +
\frac{\Delta t (u^{n,k})^2 + (1-\Delta t)u^{n,k} - u^{n-1}}
{2\Delta t u^{n,k} + 1 - \Delta t}
$$
Compare notation with
$$
u = u^{-} +
\frac{\Delta t (u^{-})^2 + (1-\Delta t)u^{-} - u^{(1)}}
{2\Delta t u^{-} + 1 - \Delta t}
$$
Relaxation with relaxation parameter \( \omega \) (weight old and new value):
$$ u = \omega u^* + (1-\omega) u^{-},\quad \omega \leq 1$$
Simple formula when used in Newton's method:
$$
u = u^{-} - \omega \frac{F(u^{-})}{F^{\prime}(u^{-})}
$$
Program logistic.py
def BE_logistic(u0, dt, Nt, choice='Picard',
eps_r=1E-3, omega=1, max_iter=1000):
if choice == 'Picard1':
choice = 'Picard'; max_iter = 1
u = np.zeros(Nt+1)
iterations = []
u[0] = u0
for n in range(1, Nt+1):
a = dt
b = 1 - dt
c = -u[n-1]
if choice == 'Picard':
def F(u):
return a*u**2 + b*u + c
u_ = u[n-1]
k = 0
while abs(F(u_)) > eps_r and k < max_iter:
u_ = omega*(-c/(a*u_ + b)) + (1-omega)*u_
k += 1
u[n] = u_
iterations.append(k)
def BE_logistic(u0, dt, Nt, choice='Picard',
eps_r=1E-3, omega=1, max_iter=1000):
...
elif choice == 'Newton':
def F(u):
return a*u**2 + b*u + c
def dF(u):
return 2*a*u + b
u_ = u[n-1]
k = 0
while abs(F(u_)) > eps_r and k < max_iter:
u_ = u_ - F(u_)/dF(u_)
k += 1
u[n] = u_
iterations.append(k)
return u, iterations
The Crank-Nicolson method with a geometric mean:
def CN_logistic(u0, dt, Nt):
u = np.zeros(Nt+1)
u[0] = u0
for n in range(0, Nt):
u[n+1] = (1 + 0.5*dt)/(1 + dt*u[n] - 0.5*dt)*u[n]
return u
Figure 1: The impact of solution strategies and for four different time step lengths on the solution.
Figure 2: Comparison of the number of iterations at various time levels for Picard and Newton iteration.
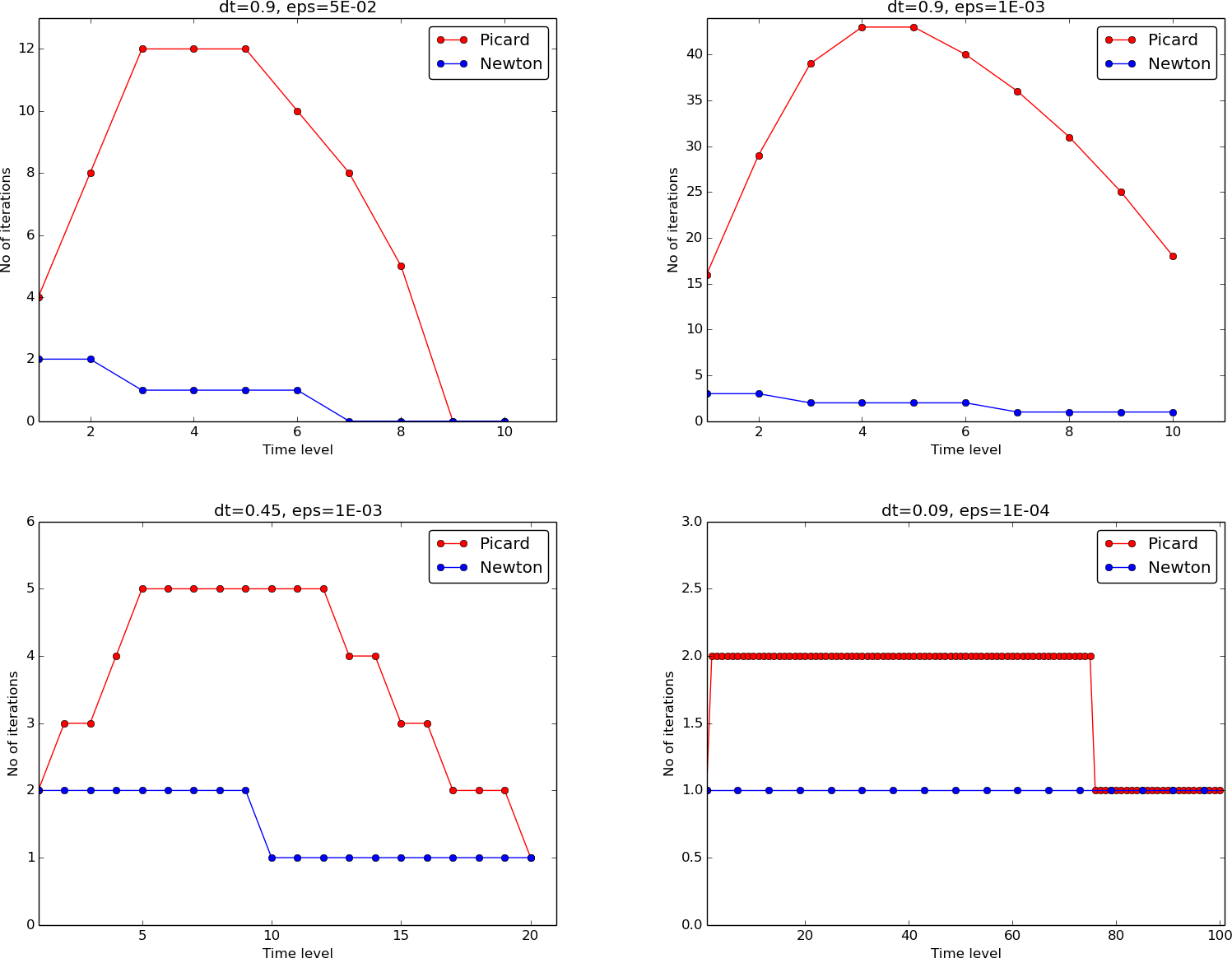
Other \( \omega=1 \) experiments:
| \( \Delta t \) | \( \epsilon_r \) | Picard | Newton |
|---|---|---|---|
| \( 0.2 \) | \( 10^{-7} \) | 5 | 2 |
| \( 0.2 \) | \( 10^{-3} \) | 2 | 1 |
| \( 0.4 \) | \( 10^{-7} \) | 12 | 3 |
| \( 0.4 \) | \( 10^{-3} \) | 4 | 2 |
| \( 0.8 \) | \( 10^{-7} \) | 58 | 3 |
| \( 0.8 \) | \( 10^{-3} \) | 4 | 2 |
$$
u^{\prime} = f(u, t)
$$
Note: \( f \) is in general nonlinear in \( u \) so the ODE is nonlinear
Forward Euler and all explicit methods sample \( f \) with known values and all nonlinearities are gone:
$$ \frac{{\color{red}u^{n+1}}-u^n}{\Delta t} = f(u^n, t_n) $$
Backward Euler \( [D_t^- u = f]^n \) leads to nonlinear algebraic equations:
$$ F(u^n) = u^{n} - \Delta t\, f(u^n, t_n) - u^{n-1}=0$$
Alternative notation:
$$ F(u) = u - \Delta t\, f(u, t_n) - u^{(1)} = 0$$
A simple Picard iteration, not knowing anything about the nonlinear structure of \( f \), must approximate \( f(u,t_n) \) by \( f(u^{-},t_n) \):
$$ \hat F(u) = u - \Delta t\, f(u^{-},t_n) - u^{(1)}$$
The iteration starts with \( u^{-}=u^{(1)} \) and proceeds with repeating
$$ u^* = \Delta t\, f(u^{-},t_n) + u^{(1)},\quad
u = \omega u^* + (1-\omega)u^{-},
\quad u^{-}\ \leftarrow\ u$$
until a stopping criterion is fulfilled.
Trick for partially implicit treatment of a general \( f(u,t) \):
$$ f(u^{-},t)\frac{u}{u^{-1}} $$
(Idea: \( u\approx u^{-} \))
Newton's method requires the computation of the derivative
$$ F^{\prime}(u) = 1 - \Delta t\frac{\partial f}{\partial u}(u,t_n)$$
Start with \( u^{-}=u^{(1)} \), then iterate
$$
u = u^{-} - \omega \frac{F(u^{-})}{F^{\prime}(u^{-})}
= u^{-} - \omega \frac{u^{(1)} + \Delta t\, f(u^{-},t_{n})}{1 - \Delta t
\frac{\partial}{\partial u}f(u^{-},t_n)}
$$
The standard Crank-Nicolson scheme with arithmetic mean approximation of \( f \) reads
$$ \frac{u^{n+1} - u^n}{\Delta t} = \half(f(u^{n+1}, t_{n+1})
+ f(u^n, t_n))$$
Nonlinear algebraic equation:
$$
F(u) = u - u^{(1)} - \Delta t{\half}f(u,t_{n+1}) -
\Delta t{\half}f(u^{(1)},t_{n}) = 0
$$
Picard iteration (for a general \( f \)):
$$ \hat F(u) = u - u^{(1)} - \Delta t{\half}f(u^{-},t_{n+1}) -
\Delta t{\half}f(u^{(1)},t_{n})$$
Newton's method:
$$
F(u) = u - u^{(1)} - \Delta t{\half}f(u,t_{n+1}) -
\Delta t{\half}f(u^{(1)},t_{n})
$$
$$ F^{\prime}(u)= 1 - \half\Delta t\frac{\partial f}{\partial u}(u,t_{n+1})$$
$$
\begin{align*}
\frac{d}{dt}u_0(t) &= f_0(u_0(t),u_1(t),\ldots,u_N(t),t)\\
\frac{d}{dt}u_1(t) &= f_1(u_0(t),u_1(t),\ldots,u_N(t),t),\\
&\vdots\\
\frac{d}{dt}u_N(t) &= f_N(u_0(t),u_1(t),\ldots,u_N(t),t)
\end{align*}
$$
Introduce vector notation:
Vector form:
$$ u^{\prime} = f(u,t),\quad u(0)=U_0 $$
Schemes: apply scalar scheme to each component
$$
\begin{align*}
\frac{u_0^n- u_0^{n-1}}{\Delta t} &= f_0(u^n,t_n)\\
\frac{u_1^n- u_1^{n-1}}{\Delta t} &= f_1(u^n,t_n)\\
&\vdots\\
\frac{u_N^n- u_N^{n-1}}{\Delta t} &= f_N(u^n,t_n)
\end{align*}
$$
This can be written more compactly in vector form as
$$ \frac{u^n- u^{n-1}}{\Delta t} = f(u^n,t_n)$$
This is a system of nonlinear algebraic equations,
$$ u^n - \Delta t\,f(u^n,t_n) - u^{n-1}=0,$$
or written out
$$
\begin{align*}
u_0^n - \Delta t\, f_0(u^n,t_n) - u_0^{n-1} &= 0,\\
&\vdots\\
u_N^n - \Delta t\, f_N(u^n,t_n) - u_N^{n-1} &= 0\tp
\end{align*}
$$
The scaled equations for an oscillating pendulum:
$$
\begin{align}
\dot\omega &= -\sin\theta -\beta \omega |\omega|,\\
\dot\theta &= omega,
\end{align}
$$
Set \( u_0=\omega \), \( u_1=\theta \)
$$
\begin{align*}
u_0^{\prime} = f_0(u,t) &= -\sin u_1 - \beta u_0|u_0|,\\
u_1^{\prime} = f_1(u,t) &= u_1\tp
\end{align*}
$$
Crank-Nicolson discretization:
$$
\begin{align}
\frac{u_0^{n+1}-u_0^{n}}{\Delta t} &= -\sin u_1^{n+\frac{1}{2}}
- \beta u_0^{n+\frac{1}{2}}|u_0^{n+\frac{1}{2}}|
\approx -\sin\left(\frac{1}{2}(u_1^{n+1} + u_1n)\right)
- \beta\frac{1}{4} (u_0^{n+1} + u_0^n)|u_0^{n+1}+u_0^n|,\\
\frac{u_1^{n+1}-u_1^n}{\Delta t} &= v_0^{n+\frac{1}{2}}\approx
\frac{1}{2} (u_0^{n+1}+u_0^n)\tp
\end{align}
$$
Introduce \( u_0 \) and \( u_1 \) for \( u_0^{n+1} \) and \( u_1^{n+1} \), write \( u_0^{(1)} \) and \( u_1^{(1)} \) for \( u_0^n \) and \( u_1^n \), and rearrange:
$$
\begin{align*}
F_0(u_0,u_1) &=
{\color{red}u_0}
- u_0^{(1)} + \Delta t\,\sin\left(\frac{1}{2}({\color{red}u_1}
+ u_1^{(1)})\right)
+ \frac{1}{4}\Delta t\beta ({\color{red}u_0} + u_0^{(1)})
|{\color{red}u_0} + u_0^{(1)}| =0
\\
F_1(u_0,u_1) &=
{\color{red}u_1} - u_1^{(1)} -\frac{1}{2}\Delta t({\color{red}u_0}
+ u_0^{(1)}) =0
\end{align*}
$$
$$
\begin{align*}
x\cos y + y^3 & = 0\\
y^2e^x + xy &= 2
\end{align*}
$$
Systems of nonlinear algebraic equations arise from solving systems of ODEs or solving PDEs
$$ F(u) = 0$$
where
$$ u=(u_0,\ldots,u_N),\quad F=(F_0,\ldots,F_N)$$
Special linear system-type structure
(arises frequently in PDE problems):
$$ A(u)u = b(u)$$
Picard iteration for \( F(u)=0 \) is meaningless unless there is some structure so we can linearize. For \( A(u)u=b(u) \) we can linearize
$$ A(u^{-})u = b(u^{-})$$
Note: we solve a system of nonlinear algebraic equations as a sequence of linear systems.
Given \( A(u)u=b(u) \) and an initial guess \( u^{-} \), iterate until convergence:
"Until convergence": \( ||u - u^{-}|| \leq \epsilon_u \) or \( ||A(u)u-b|| \leq\epsilon_r \)
Linearization of \( F(u)=0 \) equation via multi-dimensional Taylor series:
$$ F(u) = F(u^{-}) + J(u^{-}) \cdot (u - u^{-}) + \mathcal{O}(||u - u^{-}||^2) $$
where \( J \) is the Jacobian of \( F \), sometimes denoted \( \nabla_uF \), defined by
$$ J_{i,j} = \frac{\partial F_i}{\partial u_j}$$
Approximate the original nonlinear system \( F(u)=0 \) by
$$ \hat F(u) = F(u^{-}) + J(u^{-}) \cdot \delta u =0,\quad
\delta u = u - u^{-}$$
which is linear vector equation in \( u \)
$$ \underline{F(u^{-})}_{\mbox{vector}} +
\underline{J(u^{-})}_{\mbox{matrix}} \cdot
\underline{\delta u}_{\mbox{vector}} =0$$
Solution by a two-step procedure:
Relaxed update:
$$ u = \omega(u^{-} +\delta u)
+ (1-\omega)u^{-} = u^{-} + \omega\delta u
$$
For
$$ F_i = \sum_k A_{i,k}(u)u_k - b_i(u)$$
one gets
$$
J_{i,j} = \frac{\partial F_i}{\partial u_j}
= \sum_k \frac{\partial A_{i,k}}{\partial u_j}u_k
+ A_{i,j} -
\frac{\partial b_i}{\partial u_j}
$$
Matrix form:
$$ (A + A^{\prime}u + b^{\prime})\delta u = -Au + b$$
$$ (A(u^{-}) + A^{\prime}(u^{-})u^{-} + b^{\prime}(u^{-}))\delta u
= -A(u^{-})u^{-} + b(u^{-})$$
Newton:
$$ (A(u^{-}) + A^{\prime}(u^{-})u^{-} + b^{\prime}(u^{-}))\delta u
= -A(u^{-})u^{-} + b(u^{-})$$
Rewrite:
$$ \underbrace{A(u^{-})(u^{-}+\delta u) - b(u^{-})}_{\hbox{Picard system}}
+\, \gamma (A^{\prime}(u^{-})u^{-} + b^{\prime}(u^{-}))\delta u
= 0$$
All the "Picard terms" are contained in the Newton formulation.
Write a common Picard-Newton algorithm so we can trivially switch between the two methods (e.g., start with Picard, get faster convergence with Newton when \( u \) is closer to the solution)
Given \( A(u) \), \( b(u) \), and an initial guess \( u^{-} \), iterate until convergence:
Note:
Let \( ||\cdot|| \) be the standard Eucledian vector norm. Several termination criteria are much in use:
Problem with relative criterion: a small \( ||F(u_0)|| \) (because \( u_0\approx u \), perhaps because of small \( \Delta t \)) must be significantly reduced. Better with absolute criterion.
$$
||F(u)|| \leq \epsilon_{rr} ||F(u_0)|| + \epsilon_{ra}
$$
$$
||F(u)|| \leq \epsilon_{rr} ||F(u_0)|| + \epsilon_{ra}
\quad\hbox{or}\quad
||\delta u|| \leq \epsilon_{ur} ||u_0|| + \epsilon_{ua}
\quad\hbox{or}\quad
k>k_{\max}
$$
Spreading of a disease (e.g., a flu) can be modeled by a \( 2\times 2 \) ODE system
$$
\begin{align*}
S^{\prime} &= -\beta SI\\
I^{\prime} &= \beta SI - \nu I
\end{align*}
$$
Here:
A Crank-Nicolson scheme:
$$
\begin{align*}
\frac{S^{n+1}-S^n}{\Delta t} &= -\beta [SI]^{n+\half}
\approx -\frac{\beta}{2}(S^nI^n + S^{n+1}I^{n+1})\\
\frac{I^{n+1}-I^n}{\Delta t} &= \beta [SI]^{n+\half} -
\nu I^{n+\half}
\approx \frac{\beta}{2}(S^nI^n + S^{n+1}I^{n+1}) -
\frac{\nu}{2}(I^n + I^{n+1})
\end{align*}
$$
New notation: \( S \) for \( S^{n+1} \), \( S^{(1)} \) for \( S^n \), \( I \) for \( I^{n+1} \), \( I^{(1)} \) for \( I^n \)
$$
\begin{align*}
F_S(S,I) &= S - S^{(1)} +
\half\Delta t\beta(S^{(1)}I^{(1)} + SI) = 0\\
F_I(S,I) &= I - I^{(1)} -
\half\Delta t\beta(S^{(1)}I^{(1)} + SI) -
\half\Delta t\nu(I^{(1)} + I) =0
\end{align*}
$$
$$
\begin{align*}
S &= \frac{S^{(1)} - \half\Delta t\beta S^{(1)}I^{(1)}}
{1 + \half\Delta t\beta I^{-}}
\\
I &= \frac{I^{(1)} + \half\Delta t\beta S^{(1)}I^{(1)}}
{1 - \half\Delta t\beta S^{-} + \nu}
\end{align*}
$$
Before a new iteration: \( S^{-}\ \leftarrow\ S \) and
\( I^{-}\ \leftarrow\ I \)
$$ F(u)=0,\quad F=(F_S,F_I),\ u=(S,I) $$
Jacobian:
$$
\renewcommand*{\arraystretch}{2}
J = \left(\begin{array}{cc}
\frac{\partial}{\partial S} F_S & \frac{\partial}{\partial I}F_S\\
\frac{\partial}{\partial S} F_I & \frac{\partial}{\partial I}F_I
\end{array}\right)
= \left(\begin{array}{cc}
1 + \half\Delta t\beta I & \half\Delta t\beta\\
- \half\Delta t\beta S & 1 - \half\Delta t\beta I -
\half\Delta t\nu
\end{array}\right)
$$
Newton system: \( J(u^{-})\delta u = -F(u^{-}) \)
$$
\begin{align*}
\renewcommand*{\arraystretch}{1.5}
&
\left(\begin{array}{cc}
1 + \half\Delta t\beta I^{-} & \half\Delta t\beta S^{-}\\
- \half\Delta t\beta S^{-} & 1 - \half\Delta t\beta I^{-} -
\half\Delta t\nu
\end{array}\right)
\left(\begin{array}{c}
\delta S\\
\delta I
\end{array}\right)
=\\
& \qquad\qquad
\left(\begin{array}{c}
S^{-} - S^{(1)} + \half\Delta t\beta(S^{(1)}I^{(1)} + S^{-}I^{-})\\
I^{-} - I^{(1)} - \half\Delta t\beta(S^{(1)}I^{(1)} + S^{-}I^{-}) -
\half\Delta t\nu(I^{(1)} + I^{-})
\end{array}\right)
\end{align*}
$$
For this particular system of ODEs, explicit time integration methods work very well. Even a Forward Euler scheme is fine, but the 4-th order Runge-Kutta method is an excellent balance between high accuracy, high efficiency, and simplicity.
Goal: linearize a PDE like
$$
\frac{\partial u}{\partial t} = \nabla\cdot ({\color{red}\dfc(u)\nabla u})
+ {\color{red}f(u)}
$$
$$
\begin{align*}
\frac{\partial u}{\partial t} &= \nabla\cdot (\dfc(u)\nabla u) + f(u),\quad
&\x\in\Omega,\ t\in (0,T]
\\
-\dfc(u)\frac{\partial u}{\partial n} &= g,\quad &\x\in\partial\Omega_N,\
t\in (0,T]
\\
u &= u_0,\quad &\x\in\partial\Omega_D,\ t\in (0,T]
\end{align*}
$$
Forward Euler method:
$$ [D_t^+ u = \nabla\cdot (\dfc(u)\nabla u) + f(u)]^n$$
$$ \frac{u^{n+1} - u^n}{\Delta t} = \nabla\cdot (\dfc(u^n)\nabla u^n)
+ f(u^n)$$
This is a linear equation in the unknown \( u^{n+1}(\x) \), with solution
$$ u^{n+1} = u^n + \Delta t\nabla\cdot (\dfc(u^n)\nabla u^n) +
\Delta t f(u^n) $$
Disadvantage: \( \Delta t \leq (\max\alpha)^{-1}(\Delta x^2 + \Delta y^2 + \Delta z^2) \)
Backward Euler scheme:
$$ [D_t^- u = \nabla\cdot (\dfc(u)\nabla u) + f(u)]^n$$
Written out:
$$
\frac{u^{n} - u^{n-1}}{\Delta t} = \nabla\cdot (\dfc(u^n)\nabla u^n)
+ f(u^n)
$$
This is a nonlinear, stationary PDE for the unknown function \( u^n(\x) \)
We have
$$
\frac{u^{n} - u^{n-1}}{\Delta t} = \nabla\cdot (\dfc(u^n)\nabla u^n)
+ f(u^n)
$$
Picard iteration:
$$
\frac{u^{n,k+1} - u^{n-1}}{\Delta t} = \nabla\cdot (\dfc(u^{n,k})
\nabla u^{n,k+1})
+ f(u^{n,k})
$$
Start iteration with \( u^{n,0}=u^{n-1} \)
$$
\frac{u^{n,k+1} - u^{n-1}}{\Delta t} = \nabla\cdot (\dfc(u^{n,k})
\nabla u^{n,k+1})
+ f(u^{n,k})
$$
Rewrite with a simplified, implementation-friendly notation:
$$
\frac{u - u^{(1)}}{\Delta t} = \nabla\cdot (\dfc(u^{-})
\nabla u)
+ f(u^{-})
$$
Start iteration with \( u^{-}=u^{(1)} \); update with \( u^{-} \) to \( u \).
Let \( u^{n,k} \) be an approximation to the unknown \( u^n \). We seek a better approximation
$$
u^{n} = u^{n,k} + \delta u
$$
Result: linear PDE for the approximate correction \( \delta u \)
Insert \( u^{n,k} +\delta u \) for \( u^n \) in PDE:
$$
\frac{u^{n,k} +\delta u - u^{n-1}}{\Delta t} =
\nabla\cdot (\dfc(u^{n,k} + \delta u)\nabla (u^{n,k}+\delta u))
+ f(u^{n,k}+\delta u)
$$
Taylor expand \( \dfc(u^{n,k} + \delta u) \) and \( f(u^{n,k}+\delta u) \):
$$
\begin{align*}
\dfc(u^{n,k} + \delta u) & = \dfc(u^{n,k}) + \frac{d\dfc}{du}(u^{n,k})
\delta u + \Oof{\delta u^2}\approx \dfc(u^{n,k}) + \dfc^{\prime}(u^{n,k})\delta u\\
f(u^{n,k}+\delta u) &= f(u^{n,k}) + \frac{df}{du}(u^{n,k})\delta u
+ \Oof{\delta u^2}\approx f(u^{n,k}) + f^{\prime}(u^{n,k})\delta u
\end{align*}
$$
Inserting linear approximations of \( \dfc \) and \( f \):
$$
\begin{align*}
\frac{u^{n,k} +\delta u - u^{n-1}}{\Delta t} &=
\nabla\cdot (\dfc(u^{n,k})\nabla u^{n,k}) + f(u^{n,k}) + \\
&\quad \nabla\cdot (\dfc(u^{n,k})\nabla \delta u)
+ \nabla\cdot (\dfc^{\prime}(u^{n,k})\delta u\nabla u^{n,k}) + \\
&\quad \nabla\cdot (\dfc^{\prime}(u^{n,k})\underbrace{\delta u\nabla \delta u}_{\mbox{dropped}})
+ f^{\prime}(u^{n,k})\delta u
\end{align*}
$$
Note: \( \dfc^{\prime}(u^{n,k})\delta u\nabla \delta u \) is \( \Oof{\delta u^2} \) and therefore omitted.
$$ \delta F(\delta u; u^{n,k}) = -F(u^{n,k})$$
with
$$
\begin{align*}
F(u^{n,k}) &= \frac{u^{n,k} - u^{n-1}}{\Delta t} -
\nabla\cdot (\dfc(u^{n,k})\nabla u^{n,k}) + f(u^{n,k})
\\
\delta F(\delta u; u^{n,k}) &=
- \frac{1}{\Delta t}\delta u +
\nabla\cdot (\dfc(u^{n,k})\nabla \delta u) + \\
&\qquad \nabla\cdot (\dfc^{\prime}(u^{n,k})\delta u\nabla u^{n,k})
+ f^{\prime}(u^{n,k})\delta u
\end{align*}
$$
Note:
Rewrite the PDE for \( \delta u \) using \( u^{n,k} + \delta u =u^{n,k+1} \):
$$
\begin{align*}
& \frac{u^{n,k+1} - u^{n-1}}{\Delta t} =
\nabla\cdot (\dfc(u^{n,k})\nabla u^{n,k+1}) + f(u^{n,k})\\
&\qquad + \nabla\cdot (\dfc^{\prime}(u^{n,k})\delta u\nabla u^{n,k})
+ f^{\prime}(u^{n,k})\delta u
\end{align*}
$$
Note:
$$ \delta F(\delta u; u^{-}) =- F(u^{-})\quad\hbox{(PDE)}$$
$$
\begin{align*}
F(u^{-}) &= \frac{u^{-} - u^{(1)}}{\Delta t} -
\nabla\cdot (\dfc(u^{-})\nabla u^{-}) + f(u^{-})
\\
\delta F(\delta u; u^{-}) &=
- \frac{1}{\Delta t}\delta u +
\nabla\cdot (\dfc(u^{-})\nabla \delta u) \ + \nonumber\\
&\quad \nabla\cdot (\dfc^{\prime}(u^{-})\delta u\nabla u^{-})
+ f^{\prime}(u^{-})\delta u
\end{align*}
$$
$$
\begin{align*}
& \frac{u - u^{(1)}}{\Delta t} =
\nabla\cdot (\dfc(u^{-})\nabla u) + f(u^{-}) + \\
&\qquad \gamma(\nabla\cdot (\dfc^{\prime}(u^{-})(u - u^{-})\nabla u^{-})
+ f^{\prime}(u^{-})(u - u^{-}))
\end{align*}
$$
Observe:
Why is this formulation convenient? Easy to switch (start with Picard, use Newton close to solution)
Crank-Nicolson discretization applies a centered difference at \( t_{n+\frac{1}{2}} \):
$$ [D_t u = \nabla\cdot (\dfc(u)\nabla u) + f(u)]^{n+\frac{1}{2}}\tp$$
Many choices of formulating an arithmetic means:
$$
\begin{align*}
[f(u)]^{n+\frac{1}{2}} &\approx f(\frac{1}{2}(u^n + u^{n+1}))
= [f(\overline{u}^t)]^{n+\frac{1}{2}}\\
[f(u)]^{n+\frac{1}{2}} &\approx \frac{1}{2}(f(u^n) + f(u^{n+1}))
=[\overline{f(u)}^t]^{n+\frac{1}{2}}\\
[\dfc(u)\nabla u]^{n+\frac{1}{2}} &\approx
\dfc(\frac{1}{2}(u^n + u^{n+1}))\nabla (\frac{1}{2}(u^n + u^{n+1}))
= \dfc(\overline{u}^t)\nabla \overline{u}^t]^{n+\frac{1}{2}}\\
[\dfc(u)\nabla u]^{n+\frac{1}{2}} &\approx
\frac{1}{2}(\dfc(u^n) + \dfc(u^{n+1}))\nabla (\frac{1}{2}(u^n + u^{n+1}))
= [\overline{\dfc(u)}^t\nabla\overline{u}^t]^{n+\frac{1}{2}}\\
[\dfc(u)\nabla u]^{n+\frac{1}{2}} &\approx
\frac{1}{2}(\dfc(u^n)\nabla u^n + \dfc(u^{n+1})\nabla u^{n+1})
= [\overline{\dfc(u)\nabla u}^t]^{n+\frac{1}{2}}
\end{align*}
$$
Is there any differences in accuracy between
More precisely,
$$
\begin{align*}
[PQ]^{n+\frac{1}{2}} = P^{n+\frac{1}{2}}Q^{n+\frac{1}{2}}
&\approx
\frac{1}{2}(P^n + P^{n+1})\frac{1}{2}(Q^n + Q^{n+1})\\
[PQ]^{n+\frac{1}{2}} & \approx \frac{1}{2}(P^nQ^n + P^{n+1}Q^{n+1})
\end{align*}
$$
It can be shown (by Taylor series around \( t_{n+\frac{1}{2}} \)) that both approximations are \( \Oof{\Delta t^2} \)
No big difference from the Backward Euler case, just more terms:
Differential equation:
$$
-(\dfc(u)u^{\prime})^{\prime} + au = f(u),\quad x\in (0,L)
$$
Boundary conditions:
$$
\dfc(u(0))u^{\prime}(0) = C,\quad u(L)=D
$$
1. As stationary limit of a diffusion PDE
$$ u_t = (\alpha(u)u_x)_x + au + f(u) $$
(\( u_t\rightarrow 0 \))
2. The time-discrete problem at each time level arising from a Backward Euler scheme for a diffusion PDE
$$ u_t = (\alpha(u)u_x)_x + f(u) $$
(\( au \) comes from \( u_t \), \( a\sim 1/\Delta t \), \( f(u) := f(u) - u^{n-1}/\Delta t \))
The nonlinear term \( (\dfc(u)u^{\prime})^{\prime} \) behaves just as a variable coefficient term \( (\dfc(x)u^{\prime})^{\prime} \) wrt discretization:
$$ [-D_x\dfc D_x u +au = f]_i$$
Written out at internal points:
$$
\begin{align*}
-\frac{1}{\Delta x^2}
\left(\dfc_{i+\half}(u_{i+1}-u_i) -
\dfc_{i-\half}(u_{i}-u_{i-1})\right)
+ au_i &= f(u_i)
\end{align*}
$$
\( \dfc_{i+\half} \): two choices
$$
\begin{align*}
\dfc_{i+\half} &\approx
\dfc(\half(u_i + u_{i+1})) =
[\dfc(\overline{u}^x)]^{i+\half}
\\
\dfc_{i+\half} &\approx
\half(\dfc(u_i) + \dfc(u_{i+1})) = [\overline{\dfc(u)}^x]^{i+\half}
\end{align*}
$$
$$ \dfc_{i+\half} \approx
\half(\dfc(u_i) + \dfc(u_{i+1})) = [\overline{\dfc(u)}^x]^{i+\half} $$
results in
$$ [-D_x\overline{\dfc}^x D_x u +au = f]_i\tp$$
$$
\begin{align*}
&-\frac{1}{2\Delta x^2}
\left((\dfc(u_i)+\dfc(u_{i+1}))(u_{i+1}-u_i) -
(\dfc(u_{i-1})+\dfc(u_{i}))(u_{i}-u_{i-1})\right)\\
&\qquad\qquad + au_i = f(u_i)
\end{align*}
$$
$$ [\dfc(u)D_{2x}u = C]_0$$
$$
\dfc(u_0)\frac{u_{1} - u_{-1}}{2\Delta x} = C
$$
The fictitious value \( u_{-1} \) can, as usual, be eliminated with the aid of the scheme at \( i=0 \)
Structure of nonlinear algebraic equations:
$$ A(u)u = b(u)$$
$$
\begin{align*}
A_{i,i} &= \frac{1}{2\Delta x^2}(-\dfc(u_{i-1}) + 2\dfc(u_{i})
-\dfc(u_{i+1})) + a\\
A_{i,i-1} &= -\frac{1}{2\Delta x^2}(\dfc(u_{i-1}) + \dfc(u_{i}))\\
A_{i,i+1} &= -\frac{1}{2\Delta x^2}(\dfc(u_{i}) + \dfc(u_{i+1}))\\
b_i &= f(u_i)
\end{align*}
$$
Note:
\( i=0 \): insert
$$
u_{-1} = u_1 -\frac{2\Delta x}{\dfc(u_0)}
$$
in \( A_{0,0} \). The expression for \( A_{i,i+1} \)
applies for \( i=0 \), and \( A_{i,i-1} \) for \( i=0 \) does not enter the system.
1. For \( i=N_x \) we can use the Dirichlet condition as a separate equation
$$ u_i = D,\quad i=N_x$$
2. Alternative: for \( i=N_x \) we can substitute \( u_{N_x} \) in \( A_{i,i} \) by \( D \) and have \( N_x-1 \) equations.
Use the most recently computed vaue \( u^{-} \) of \( u \) in \( A(u) \) and \( b(u) \):
$$ A(u^{-})u = b(u^{-})$$
Tridiagonal system: use tridiagonal Gaussian elimination
\( N_x=2 \) and Dirichlet condition not as a separate equation:
$$
\left(\begin{array}{cc}
A_{0,0}& A_{0,1}\\
A_{1,0} & A_{1,1}
\end{array}\right)
\left(\begin{array}{c}
u_0\\
u_1
\end{array}\right)
=
\left(\begin{array}{c}
b_0\\
b_1
\end{array}\right)
$$
$$
\begin{align*}
A_{0,0} &= \frac{1}{2\Delta x^2}(-\dfc(u_{1}^{-}) + 2\dfc(u_{0}^{-})
-\dfc(u_{1}^{-})) + a\\
A_{0,1} &=
-\frac{1}{2\Delta x^2}(\dfc(u_{0}^{-}) + \dfc(u_{1}^{-}))\\
A_{1,0} &=
-\frac{1}{2\Delta x^2}(\dfc(u_{0}^{-}) + \dfc(u_{1}^{-}))\\
A_{1,1} &=
\frac{1}{2\Delta x^2}(-\dfc(u_{0}^{-}) + 2\dfc(u_{1}^{-})
-\dfc(u_{2})) + a\\
b_0 &=
f(u_0^{-})\\
b_1 &=
f(u_1^{-})
\end{align*}
$$
Note: subst. \( u_{-1} \) by Neumann condition formula, subst. \( u_2 \) by \( D \)
\( N_x=2 \) and including \( u_2=D \) as a separate equation:
$$
\left(\begin{array}{ccc}
A_{0,0}& A_{0,1} & A_{0,2}\\
A_{1,0} & A_{1,1} & A_{1,2}\\
A_{2,0} & A_{2,1} & A_{2,2}
\end{array}\right)
\left(\begin{array}{c}
u_0\\
u_1\\
u_2
\end{array}\right)
=
\left(\begin{array}{c}
b_0\\
b_1\\
b_2
\end{array}\right)
$$
with \( A_{i,j} \) and \( b_i \) as before for \( i,j=1,2 \), keeping
\( u_2 \) as unknown in \( A_{1,1} \), and
$$
\begin{align*}
A_{0,2}&=A_{2,0}=A_{2,1}=0\\
A_{1,2}&=
-\frac{1}{2\Delta x^2}(\dfc(u_{1}) + \dfc(u_{2}))\\
A_{2,2}=&1,\ b_2=D
\end{align*}
$$
Nonlinear eq.no \( i \) has the structure
$$
\begin{align*}
F_i &= A_{i,i-1}(u_{i-1},u_i)u_{i-1} +
A_{i,i}(u_{i-1},u_i,u_{i+1})u_i +\\
&\qquad A_{i,i+1}(u_i, u_{i+1})u_{i+1} - b_i(u_i)
\end{align*}
$$
Need Jacobian, i.e., need to differentiate \( F(u)=A(u)u - b(u) \) wrt \( u \). Example:
$$
\begin{align*}
&\frac{\partial}{\partial u_i}(A_{i,i}(u_{i-1},u_i,u_{i+1})u_i) =
\frac{\partial A_{i,i}}{\partial u_i}u_i + A_{i,i}
\frac{\partial u_i}{\partial u_i}\\
&\quad =
\frac{\partial}{\partial u_i}(
\frac{1}{2\Delta x^2}(-\dfc(u_{i-1}) + 2\dfc(u_{i})
-\dfc(u_{i+1})) + a)u_i +\\
&\qquad\frac{1}{2\Delta x^2}(-\dfc(u_{i-1}) + 2\dfc(u_{i})
-\dfc(u_{i+1})) + a\\
&\quad =\frac{1}{2\Delta x^2}(2\dfc^\prime (u_i)u_i
-\dfc(u_{i-1}) + 2\dfc(u_{i})
-\dfc(u_{i+1})) + a
\end{align*}
$$
The complete Jacobian becomes (make sure you get this!)
$$
\begin{align*}
J_{i,i} &= \frac{\partial F_i}{\partial u_i}
= \frac{\partial A_{i,i-1}}{\partial u_i}u_{i-1}
+ \frac{\partial A_{i,i}}{\partial u_i}u_i
+ A_{i,i}
+ \frac{\partial A_{i,i+1}}{\partial u_i}u_{i+1}
- \frac{\partial b_i}{\partial u_{i}}\\
&=
\frac{1}{2\Delta x^2}(
-\dfc^{\prime}(u_i)u_{i-1}
+2\dfc^{\prime}(u_i)u_{i}
-\dfc(u_{i-1}) + 2\dfc(u_i) - \dfc(u_{i+1})) +\\
&\quad a
-\frac{1}{2\Delta x^2}\dfc^{\prime}(u_{i})u_{i+1}
- b^{\prime}(u_i)\\
J_{i,i-1} &= \frac{\partial F_i}{\partial u_{i-1}}
= \frac{\partial A_{i,i-1}}{\partial u_{i-1}}u_{i-1}
+ A_{i-1,i}
+ \frac{\partial A_{i,i}}{\partial u_{i-1}}u_i
- \frac{\partial b_i}{\partial u_{i-1}}\\
&=
\frac{1}{2\Delta x^2}(
-\dfc^{\prime}(u_{i-1})u_{i-1} - (\dfc(u_{i-1}) + \dfc(u_i))
+ \dfc^{\prime}(u_{i-1})u_i)\\
J_{i,i+1} &= \frac{\partial A_{i,i+1}}{\partial u_{i-1}}u_{i+1}
+ A_{i+1,i} +
\frac{\partial A_{i,i}}{\partial u_{i+1}}u_i
- \frac{\partial b_i}{\partial u_{i+1}}\\
&=\frac{1}{2\Delta x^2}(
-\dfc^{\prime}(u_{i+1})u_{i+1} - (\dfc(u_{i}) + \dfc(u_{i+1}))
+ \dfc^{\prime}(u_{i+1})u_i)
\end{align*}
$$
$$
\begin{align*}
F_i &= -\frac{1}{2\Delta x^2}
((\dfc(u_i)+\dfc(u_{i+1}))(u_{i+1}-u_i) -
(\dfc(u_{i-1})+\dfc(u_{i}))\times \\
&\qquad (u_{i}-u_{i-1})) + au_i - f(u_i) = 0
\end{align*}
$$
At \( i=0 \), replace \( u_{-1} \) by formula from Neumann condition.
$$ F_{N_x}(u_0,\ldots,u_{N_x}) = u_{N_x} - D = 0\tp$$
Note: The size of the Jacobian depends on 1 or 2.
Galerkin's method for \( -(\dfc(u)u')' + au = f(u) \):
$$
\int_0^L \dfc(u)u^{\prime}v^{\prime}\dx + \int_0^L auv\dx =
\int_0^L f(u)v\dx + [\dfc(u)u^{\prime}v]_0^L,\quad \forall v\in V
$$
Insert Neumann condition:
$$ [\dfc(u)u^{\prime}v]_0^L = \dfc(u(L))u^{\prime}(L)v(L) - \dfc(u(0))u^{\prime}(0)v(0)
= -Cv(0)
$$
Find \( u\in V \) such that
$$
\int_0^L \dfc(u)u^{\prime}v^{\prime}\dx + \int_0^L auv\dx =
\int_0^L f(u)v\dx - Cv(0),\quad \forall v\in V
$$
\( \forall v\in V\ \Rightarrow\ \forall i\in\If \), \( v=\baspsi_i \). Inserting \( u=D+\sum_jc_j\baspsi_j \) and sorting terms:
$$
\sum_{j}\left(
\int\limits_0^L \dfc(D+\sum_{k}c_k\baspsi_k)
\baspsi_j^{\prime}\baspsi_i^{\prime}\dx\right)c_j =
\int\limits_0^L f(D+\sum_{k}c_k\baspsi_k)\baspsi_i\dx -
C\baspsi_i(0)
$$
This is a nonlinear algebraic system
$$ \baspsi_i = \basphi_{\nu(i)},\quad i\in\If$$
Degree of freedom number \( \nu(i) \) in the mesh corresponds to unknown number \( i \) (\( c_i \)).
Model problem: \( \nu(i)=i \), \( \If=\{0,\ldots,N_n-2\} \) (last node excluded)
$$ u = D + \sum_{j\in\If} c_j\basphi_{\nu(j)}$$
or with \( \basphi_i \) in the boundary function:
$$ u = D\basphi_{N_n-1} + \sum_{j\in\If} c_j\basphi_{j}$$
Since \( u \) is represented by \( \sum_j\basphi_j u(\xno{j}) \), we may use the same approximation for \( f(u) \):
$$
f(u)\approx \sum_{j} f(\xno{j})\basphi_j
$$
\( f(\xno{j}) \): value of \( f \) at node \( j \). With \( u_j \) as \( u(\xno{j}) \), we can write
$$
f(u)\approx \sum_{j} f(u_{j})\basphi_j
$$
This approximation is known as the group finite element method or the product approximation technique. The index \( j \) runs over all node numbers in the mesh.
Simple nonlinear problem: \( -u^{\prime\prime}=u^2 \), \( u'(0)=1 \), \( u'(L)=0 \).
$$ \int_0^L u^{\prime}v^{\prime}\dx = \int_0^L u^2v\dx
- v(0),\quad\forall v\in V$$
Now,
Consider \( \int u^2v\dx \) with \( u = \sum_ku_k\basphi_k \) and \( v=\basphi_i \):
$$ \int_0^L (\sum_ku_k\basphi_k)^2\basphi_i\dx$$
Tedious exact evaluation on uniform P1 elements:
$$ \frac{h}{12}(u_{i-1}^2 + 2u_i(u_{i-1} + u_{i+1}) + 6u_i^2
+ u_{i+1}^2)$$
Finite difference counterpart: \( u_i^2 \) (!)
$$ \int_0^L f(u)\basphi_i\dx \approx
\int_0^L (\sum_j \basphi_jf(u_j))\basphi_i\dx
= \sum_j (\underbrace{\int_0^L \basphi_i\basphi_j\dx}_{\mbox{mass matrix }M_{i,j}}) f(u_j)$$
Corresponding part of difference equation for P1 elements:
$$ \frac{h}{6}(f(u_{i-1}) + 4f(u_i) + f(u_{i+1}))$$
Rewrite as "finite difference form plus something":
$$ \frac{h}{6}(f(u_{i-1}) + 4f(u_i) + f(u_{i+1}))
= h[{\color{red}f(u)} - \frac{h^2}{6}D_xD_x f(u)]_i$$
This is like the finite difference discretization of \( -u'' = f(u) - \frac{h^2}{6}f''(u) \)
Idea: integrate \( \int f(u)v\dx \) numerically with a rule that samples \( f(u)v \) at the nodes only. This involves great simplifications, since
$$ \sum_k u_k\basphi_k(\xno{\ell}) = u_\ell$$
and
$$ f\basphi_i(\xno{\ell}) =
f(\sum_k u_k\underbrace{\basphi_k(\xno{\ell})}_{\delta_{k\ell}})
\underbrace{\basphi_i(\xno{\ell})}_{\delta_{i\ell}}
= f(u_\ell)\delta_{i\ell}\quad \neq 0\mbox{ only for } f(u_i)$$
(\( \delta_{ij}=0 \) if \( i\neq j \) and \( \delta_{ij}=1 \) if \( i=j \))
Trapezoidal rule with the nodes only gives the finite difference form of \( [f(u)]_i \):
$$
\int_0^L f(\sum_k u_k\basphi_k)(x)\basphi_i(x)\dx
\approx h\sum_{\ell=0}^{N_n-1} f(u_\ell)\delta_{i\ell} - \mathcal{C}
= h{\color{red}f(u_i)}
$$
(\( \mathcal{C} \): boundary adjustment of rule, \( i=0,N_n-1 \))
Consider the term \( (\dfc u^{\prime})^{\prime} \), with the group finite element method: \( \dfc(u)\approx \sum_k\alpha(u_k)\basphi_k \), and the variational counterpart
$$
\int_0^L \dfc(\sum_k c_k\basphi_k)\basphi_i^{\prime}\basphi_j^{\prime}\dx
\approx
\sum_k (\int_0^L \basphi_k\basphi_i^{\prime}\basphi_j^{\prime}\dx)
\dfc(u_k) = \ldots
$$
Further calculations (see text) lead to
$$
-\frac{1}{h}(\half(\dfc(u_i) + \dfc(u_{i+1}))(u_{i+1}-u_i)
- \half(\dfc(u_{i-1}) + \dfc(u_{i}))(u_{i}-u_{i-1}))
$$
= standard finite difference discretization of \( -(\dfc(u)u^{\prime})^{\prime} \) with an arithmetic mean of \( \dfc(u) \)
Instead of the group finite element method and exact integration, use Trapezoidal rule in the nodes for \( \int_0^L \dfc(\sum_k u_k\basphi_k)\basphi_i^{\prime}\basphi_j^{\prime}\dx \).
Work at the cell level (most convenient with discontinuous \( \basphi_i' \)):
$$
\begin{align*}
& \int_{-1}^1 \alpha(\sum_t\tilde u_t\refphi_t)\refphi_r'\refphi_s'\frac{h}{2}dX
= \int_{-1}^1 \dfc(\sum_{t=0}^1
\tilde u_t\refphi_t)\frac{2}{h}\frac{d\refphi_r}{dX}
\frac{2}{h}\frac{d\refphi_s}{dX}\frac{h}{2}dX\\
&\quad = \frac{1}{2h}(-1)^r(-1)^s \int_{-1}^1 \dfc(\sum_{t=0}^1 u_t\refphi_t(X))dX
\\
& \qquad \approx \frac{1}{2h}(-1)^r(-1)^s\dfc (
\sum_{t=0}^1\refphi_t(-1)\tilde u_t) + \dfc(\sum_{t=0}^1\refphi_t(1)\tilde u_t)\\
&\quad = \frac{1}{2h}(-1)^r(-1)^s(\dfc(\tilde u_0) + \dfc(\tilde u^{(1)}))
\end{align*}
$$
$$ -(\dfc(u)u^{\prime})^{\prime} +au = f(u)$$
Uniform P1 finite elements:
$$
-(\dfc(u)u^{\prime})^{\prime} + au = f(u),\quad x\in (0,L),
\quad \dfc(u(0))u^{\prime}(0) = C,\ u(L)=D
$$
Variational form (\( v=\baspsi_i \)):
$$
F_i =
\int_0^L \dfc(u)u^{\prime}\baspsi_i^{\prime}\dx + \int_0^L au\baspsi_i\dx -
\int_0^L f(u)\baspsi_i\dx + C\baspsi_i(0) = 0
$$
Picard iteration: use "old value" \( u^{-} \) in \( \dfc(u) \) and \( f(u) \) and integrate numerically:
$$
F_i = \int_0^L (\dfc(u^{-})u^{\prime}\baspsi_i^{\prime} + au\baspsi_i)\dx -
\int_0^L f(u^{-})\baspsi_i\dx + C\baspsi_i(0)
$$
$$
F_i = \int_0^L (\dfc(u^{-})u^{\prime}\baspsi_i^{\prime} + au\baspsi_i)\dx -
\int_0^L f(u^{-})\baspsi_i\dx + C\baspsi_i(0)
$$
This is a linear problem \( a(u,v)=L(v) \) with bilinear and linear forms
$$ a(u,v) = \int_0^L (\dfc(u^{-})u^{\prime}v^{\prime} + auv)\dx,\quad
L(v) = \int_0^L f(u^{-})v\dx - Cv(0)$$
The linear system now is computed the standard way.
$$
F_i =
\int_0^L (\dfc(u)u^{\prime}\baspsi_i^{\prime} + au\baspsi_i -
f(u)\baspsi_i)\dx + C\baspsi_i(0)=0,\quad i\in\If
$$
Easy to evaluate right-hand side \( -F_i(u^{-}) \) by numerical integration:
$$
F_i =
\int_0^L (\dfc(u^{-})u^{\prime}\baspsi_i^{\prime} + au\baspsi_i -
f(u^{-})\baspsi_i)\dx + C\baspsi_i(0)=0
$$
(just known functions)
$$
\begin{align*}
\frac{\partial u}{\partial c_j} &= \frac{\partial}{\partial c_j}
\sum_kc_k\baspsi_k = \baspsi_j\\
\frac{\partial u^{\prime}}{\partial c_j} &= \frac{\partial}{\partial c_j}
\sum_kc_k\baspsi_k^{\prime} = \baspsi_j^{\prime}
\end{align*}
$$
$$
\begin{align*}
J_{i,j} = \frac{\partial F_i}{\partial c_j}
& = \int_0^L \frac{\partial}{\partial c_j}
(\dfc(u)u^{\prime}\baspsi_i^{\prime} + au\baspsi_i -
f(u)\baspsi_i)\dx\\
&=
\int_0^L
((\dfc^{\prime}(u)\frac{\partial u}{\partial c_j}u^{\prime} +
\dfc(u)\frac{\partial u^{\prime}}{\partial c_j})\baspsi_i^{\prime}
+ a\frac{\partial u}{\partial c_j}\baspsi_i -
f^{\prime}(u)\frac{\partial u}{\partial c_j}\baspsi_i)\dx\\
&=
\int_0^L
((\dfc^{\prime}(u)\baspsi_ju^{\prime} +
\dfc(u)\baspsi_j^{\prime}\baspsi_i^{\prime}
+ a\baspsi_j\baspsi_i -
f^{\prime}(u)\baspsi_j\baspsi_i)\dx\\
&=
\int_0^L
(\dfc^{\prime}(u)u^{\prime}\baspsi_i^{\prime}\baspsi_j +
\dfc(u)\baspsi_i^{\prime}\baspsi_j^{\prime}
+ (a - f(u))\baspsi_i\baspsi_j)\dx
\end{align*}
$$
Use \( \dfc^{\prime}(u^{-}) \), \( \dfc(u^{-}) \), \( f^\prime (u^{-}) \), \( f(u^{-}) \) and integrate expressions numerically (only known functions)
$$
\begin{align*}
\tilde F_r^{(e)} &=
\int_{-1}^1\left(
\dfc(\tilde u^{-})\tilde u^{-\prime}\refphi_r^{\prime} +
(a-f(\tilde u^{-}))\refphi_r\right)\det J\dX -
C\refphi_r(0)
\\
\tilde J_{r,s}^{(e)} &=
\int_{-1}^1
(\dfc^{\prime}(\tilde u^{-})\tilde u^{-\prime}\refphi_r^{\prime}\refphi_s +
\dfc(\tilde u^{-})\refphi_r^{\prime}\refphi_s^{\prime}
+ (a - f(\tilde u^{-}))\refphi_r\refphi_s)\det J\dX
\end{align*}
$$
\( r,s\in\Ifd \) (local degrees of freedom)
$$
u_t = \nabla\cdot(\dfc(u)\nabla u) + f(u)
$$
$$
u_t = \nabla\cdot(\dfc(u)\nabla u) + f(u)
$$
Backward Euler time discretization:
$$ u^n - \Delta t\nabla\cdot(\dfc(u^n)\nabla u^n) + f(u^n) = u^{n-1}$$
Alternative notation (\( u \) for \( u^n \), \( u^{(1)} \) for \( u^{n-1} \)):
$$ u - \Delta t\nabla\cdot(\dfc(u)\nabla u) - \Delta t f(u) = u^{(1)}$$
Boundary conditions: \( \partial u/\partial n=0 \) for simplicity. Variational form:
$$
\int_\Omega (uv + \Delta t\,\dfc(u)\nabla u\cdot\nabla v
- \Delta t f(u)v - u^{(1)} v)\dx = 0
$$
$$
\int_\Omega (uv + \Delta t\,\dfc(u)\nabla u\cdot\nabla v
- \Delta t f(u)v - u^{(1)} v)\dx = 0
$$
$$
F_i =
\int_\Omega (u\baspsi_i + \Delta t\,\dfc(u)\nabla u\cdot\nabla \baspsi_i
- \Delta t f(u)\baspsi_i - u^{(1)}\baspsi_i)\dx = 0
$$
Picard iteration:
$$
F_i \approx \hat F_i =
\int_\Omega (u\baspsi_i + \Delta t\,\dfc(u^{-})\nabla u\cdot\nabla \baspsi_i
- \Delta t f(u^{-})\baspsi_i - u^{(1)}\baspsi_i)\dx = 0
$$
This is a variable coefficient problem like \( au - \nabla\cdot\dfc(\x)\nabla u = f(\x,t) \) and results in a linear system
PDE problem: \( u(\x,t) \) is the exact solution of
$$
u_t = \nabla\cdot(\dfc(u)\nabla u) + f(u)
$$
Time discretization: \( u(\x) \) is the exact solution of the time-discrete spatial equation
$$ u - \Delta t\nabla\cdot(\dfc(u^n)\nabla u) - \Delta t f(u) = u^{(1)}$$
The same \( u(\x) \) is the exact solution of the (continuous) variational form:
$$
\int_\Omega (uv + \Delta t\,\dfc(u)\nabla u\cdot\nabla v
- \Delta t f(u)v - u^{(1)} v)\dx,\quad\forall v\in V
$$
Or we may approximate \( u \): \( u(\x) = \sum_jc_j\baspsi_j(\x) \) and let this spatially discrete \( u \) enter the variational form,
$$
\int_\Omega (uv + \Delta t\,\dfc(u)\nabla u\cdot\nabla v
- \Delta t f(u)v - u^{(1)} v)\dx,\quad\forall v\in V
$$
Picard iteration: \( u(\x) \) solves the approximate variational form
$$
\int_\Omega (uv + \Delta t\,\dfc(u^{-})\nabla u\cdot\nabla v
- \Delta t f(u^{-})v - u^{(1)} v)\dx
$$
Could introduce
Need to evaluate \( F_i(u^{-}) \):
$$
F_i \approx \hat F_i =
\int_\Omega (u^{-}\baspsi_i + \Delta t\,\dfc(u^{-})
\nabla u^{-}\cdot\nabla \baspsi_i
- \Delta t f(u^{-})\baspsi_i - u^{(1)}\baspsi_i)\dx
$$
To compute the Jacobian we need
$$
\begin{align*}
\frac{\partial u}{\partial c_j} &= \sum_k\frac{\partial}{\partial c_j}
c_k\baspsi_k = \baspsi_j\\
\frac{\partial \nabla u}{\partial c_j} &= \sum_k\frac{\partial}{\partial c_j}
c_k\nabla \baspsi_k = \nabla \baspsi_j
\end{align*}
$$
The Jacobian becomes
$$
\begin{align*}
J_{i,j} = \frac{\partial F_i}{\partial c_j} =
\int_\Omega & (\baspsi_j\baspsi_i + \Delta t\,\dfc^{\prime}(u)\baspsi_j
\nabla u\cdot\nabla \baspsi_i +
\Delta t\,\dfc(u)\nabla\baspsi_j\cdot\nabla\baspsi_i - \\
&\ \Delta t f^{\prime}(u)\baspsi_j\baspsi_i)\dx
\end{align*}
$$
Evaluation of \( J_{i,j} \) as the coefficient matrix in the Newton system \( J\delta u = -F \) means \( J(u^{-}) \):
$$
\begin{align*}
J_{i,j} =
\int_\Omega & (\baspsi_j\baspsi_i + \Delta t\,\dfc^{\prime}(u^{-})\baspsi_j
\nabla u^{-}\cdot\nabla \baspsi_i +
\Delta t\,\dfc(u^{-})\nabla\baspsi_j\cdot\nabla\baspsi_i - \\
&\ \Delta t f^{\prime}(u^{-})\baspsi_j\baspsi_i)\dx
\end{align*}
$$
A natural physical flux condition:
$$
-\dfc(u)\frac{\partial u}{\partial n} = g,\quad\x\in\partial\Omega_N
$$
Integration by parts gives the boundary term
$$
\int_{\partial\Omega_N}\dfc(u)\frac{\partial u}{\partial u}v\ds
$$
Inserting the nonlinear Neumann condition:
$$ -\int_{\partial\Omega_N}gv\ds$$
(no nonlinearity)
Heat conduction problems often apply a kind of Newton's cooling law, also known as a Robin condition, at the boundary:
$$
-\dfc(u)\frac{\partial u}{\partial u} = h(u)(u-T_s(t)),\quad\x\in\partial\Omega_R
$$
Here:
Inserting the condition in the boundary integral \( \int_{\partial\Omega_N}\dfc(u)\frac{\partial u}{\partial u}v\ds \):
$$ \int_{\partial\Omega_R}h(u)(u-T_s(T))v\ds$$
Use \( h(u^{-})(u-T_s) \) for Picard, differentiate for Newton
$$ u_t = \nabla\cdot(\dfc(u)\nabla u) + f(u)$$
Backward Euler in time, centered differences in space:
$$ [D_t^- u = D_x\overline{\dfc(u)}^xD_x u
+ D_y\overline{\dfc(u)}^yD_y u + f(u)]_{i,j}^n
$$
$$
\begin{align*}
u^n_{i,j} &- \frac{\Delta t}{h^2}(
\half(\dfc(u_{i,j}^n) + \dfc(u_{i+1,j}^n))(u_{i+1,j}^n-u_{i,j}^n)\\
&\quad -
\half(\dfc(u_{i-1,j}^n) + \dfc(u_{i,j}^n))(u_{i,j}^n-u_{i-1,j}^n) \\
&\quad +
\half(\dfc(u_{i,j}^n) + \dfc(u_{i,j+1}^n))(u_{i,j+1}^n-u_{i,j}^n)\\
&\quad -
\half(\dfc(u_{i,j-1}^n) + \dfc(u_{i,j}^n))(u_{i,j}^n-u_{i-1,j-1}^n))
- \Delta tf(u_{i,j}^n) = u^{n-1}_{i,j}
\end{align*}
$$
Nonlinear algebraic system on the form \( A(u)u=b(u) \)
Picard iteration in operator notation:
$$ [D_t^- u = D_x\overline{\dfc(u^{-})}^xD_x u
+ D_y\overline{\dfc(u^{-})}^yD_y u + f(u^{-})]_{i,j}^n
$$
Define the nonlinear equations (use \( u \) for \( u^n \), \( u^{(1)} \) for \( u^{n-1} \)):
$$
\begin{align*}
F_{i,j} &= u_{i,j} - \frac{\Delta t}{h^2}(\\
&\qquad \half(\dfc(u_{i,j}) + \dfc(u_{i+1,j}))(u_{i+1,j}-u_{i,j}) -\\
&\qquad \half(\dfc(u_{i-1,j}) + \dfc(u_{i,j}))(u_{i,j}-u_{i-1,j}) + \\
&\qquad \half(\dfc(u_{i,j}) + \dfc(u_{i,j+1}))(u_{i,j+1}-u_{i,j}) -\\
&\qquad \half(\dfc(u_{i,j-1}) + \dfc(u_{i,j}))(u_{i,j}-u_{i-1,j-1})) -
\Delta t\, f(u_{i,j}) - u^{(1)}_{i,j} = 0
\end{align*}
$$
$$ J_{i,j,r,s} = \frac{\partial F_{i,j}}{\partial u_{r,s}} $$
Newton system:
$$ \sum_{r\in\Ix}\sum_{s\in\Iy}J_{i,j,r,s}\delta u_{r,s} = -F_{i,j},
\quad i\in\Ix,\ j\in\Iy\tp$$
But \( F_{i,j} \) contains only \( u_{i\pm 1,j} \), \( u_{i,j\pm 1} \), and \( u_{i,j} \). We get nonzero contributions only for \( J_{i,j,i-1,j} \), \( J_{i,j,i+1,j} \), \( J_{i,j,i,j-1} \), \( J_{i,j,i,j+1} \), and \( J_{i,j,i,j} \). The Newton system collapses to
$$
\begin{align*}
J_{i,j,r,s}\delta u_{r,s} =
J_{i,j,i,j}\delta u_{i,j} & +
J_{i,j,i-1,j}\delta u_{i-1,j} +\\
& J_{i,j,i+1,j}\delta u_{i+1,j} +
J_{i,j,i,j-1}\delta u_{i,j-1}
+ J_{i,j,i,j+1}\delta u_{i,j+1}
\end{align*}
$$
$$
\begin{align*}
J_{i,j,i-1,j} &= \frac{\partial F_{i,j}}{\partial u_{i-1,j}}\\
&= \frac{\Delta t}{h^2}(\dfc^{\prime}(u_{i-1,j})(u_{i,j}-u_{i-1,j})
+ \dfc(u_{i-1,j})(-1)),\\
J_{i,j,i+1,j} &= \frac{\partial F_{i,j}}{\partial u_{i+1,j}}\\
&= \frac{\Delta t}{h^2}(-\dfc^{\prime}(u_{i+1,j})(u_{i+1,j}-u_{i,j})
- \dfc(u_{i-1,j})),\\
J_{i,j,i,j-1} &= \frac{\partial F_{i,j}}{\partial u_{i,j-1}}\\
&= \frac{\Delta t}{h^2}(\dfc^{\prime}(u_{i,j-1})(u_{i,j}-u_{i,j-1})
+ \dfc(u_{i,j-1})(-1)),\\
J_{i,j,i,j+1} &= \frac{\partial F_{i,j}}{\partial u_{i,j+1}}\\
&= \frac{\Delta t}{h^2}(-\dfc^{\prime}(u_{i,j+1})(u_{i,j+1}-u_{i,j})
- \dfc(u_{i,j-1}))\tp
\end{align*}
$$
Compute \( J_{i,j,i,j} \):
$$
\begin{align*}
F_{i,j} &= u_{i,j} - \frac{\Delta t}{h^2}(\\
&\qquad \half(\dfc(u_{i,j}) + \dfc(u_{i+1,j}))(u_{i+1,j}-u_{i,j}) -\\
&\qquad \half(\dfc(u_{i-1,j}) + \dfc(u_{i,j}))(u_{i,j}-u_{i-1,j}) + \\
&\qquad \half(\dfc(u_{i,j}) + \dfc(u_{i,j+1}))(u_{i,j+1}-u_{i,j}) -\\
&\qquad \half(\dfc(u_{i,j-1}) + \dfc(u_{i,j}))(u_{i,j}-u_{i-1,j-1})) -
\Delta t\, f(u_{i,j}) - u^{(1)}_{i,j} = 0\\
J_{i,j,i,j} &= \frac{\partial F_{i,j}}{\partial u_{i,j}}
\end{align*}
$$
$$ -\nabla\cdot\left( ||\nabla u||^q\nabla u\right) = f, $$
Pseudo-plastic fluids may be \( q=-0.8 \), which is a difficult problem for Picard/Newton iteration.
$$ \Lambda\in [0,1]:\quad q=-\Lambda 0.8 $$
$$
-\nabla\cdot\left( ||\nabla u||^{-\Lambda 0.8}\nabla u\right) = f$$
Start with \( \Lambda = 0 \), increase in steps to \( \Lambda =1 \), use previous solution as initial guess for Newton or Picard