$$
\newcommand{\uex}{{u_{\small\mbox{e}}}}
\newcommand{\uexd}[1]{{u_{\small\mbox{e}, #1}}}
\newcommand{\vex}{{v_{\small\mbox{e}}}}
\newcommand{\vexd}[1]{{v_{\small\mbox{e}, #1}}}
\newcommand{\Aex}{{A_{\small\mbox{e}}}}
\newcommand{\half}{\frac{1}{2}}
\newcommand{\halfi}{{1/2}}
\newcommand{\tp}{\thinspace .}
\newcommand{\Ddt}[1]{\frac{D #1}{dt}}
\newcommand{\E}[1]{\hbox{E}\lbrack #1 \rbrack}
\newcommand{\Var}[1]{\hbox{Var}\lbrack #1 \rbrack}
\newcommand{\Std}[1]{\hbox{Std}\lbrack #1 \rbrack}
\newcommand{\xpoint}{\boldsymbol{x}}
\newcommand{\normalvec}{\boldsymbol{n}}
\newcommand{\Oof}[1]{\mathcal{O}(#1)}
\newcommand{\x}{\boldsymbol{x}}
\newcommand{\X}{\boldsymbol{X}}
\renewcommand{\u}{\boldsymbol{u}}
\renewcommand{\v}{\boldsymbol{v}}
\newcommand{\w}{\boldsymbol{w}}
\newcommand{\V}{\boldsymbol{V}}
\newcommand{\e}{\boldsymbol{e}}
\newcommand{\f}{\boldsymbol{f}}
\newcommand{\F}{\boldsymbol{F}}
\newcommand{\stress}{\boldsymbol{\sigma}}
\newcommand{\strain}{\boldsymbol{\varepsilon}}
\newcommand{\stressc}{{\sigma}}
\newcommand{\strainc}{{\varepsilon}}
\newcommand{\I}{\boldsymbol{I}}
\newcommand{\T}{\boldsymbol{T}}
\newcommand{\dfc}{\alpha} % diffusion coefficient
\newcommand{\ii}{\boldsymbol{i}}
\newcommand{\jj}{\boldsymbol{j}}
\newcommand{\kk}{\boldsymbol{k}}
\newcommand{\ir}{\boldsymbol{i}_r}
\newcommand{\ith}{\boldsymbol{i}_{\theta}}
\newcommand{\iz}{\boldsymbol{i}_z}
\newcommand{\Ix}{\mathcal{I}_x}
\newcommand{\Iy}{\mathcal{I}_y}
\newcommand{\Iz}{\mathcal{I}_z}
\newcommand{\It}{\mathcal{I}_t}
\newcommand{\If}{\mathcal{I}_s} % for FEM
\newcommand{\Ifd}{{I_d}} % for FEM
\newcommand{\Ifb}{{I_b}} % for FEM
\newcommand{\setb}[1]{#1^0} % set begin
\newcommand{\sete}[1]{#1^{-1}} % set end
\newcommand{\setl}[1]{#1^-}
\newcommand{\setr}[1]{#1^+}
\newcommand{\seti}[1]{#1^i}
\newcommand{\sequencei}[1]{\left\{ {#1}_i \right\}_{i\in\If}}
\newcommand{\basphi}{\varphi}
\newcommand{\baspsi}{\psi}
\newcommand{\refphi}{\tilde\basphi}
\newcommand{\psib}{\boldsymbol{\psi}}
\newcommand{\sinL}[1]{\sin\left((#1+1)\pi\frac{x}{L}\right)}
\newcommand{\xno}[1]{x_{#1}}
\newcommand{\Xno}[1]{X_{(#1)}}
\newcommand{\yno}[1]{y_{#1}}
\newcommand{\Yno}[1]{Y_{(#1)}}
\newcommand{\xdno}[1]{\boldsymbol{x}_{#1}}
\newcommand{\dX}{\, \mathrm{d}X}
\newcommand{\dx}{\, \mathrm{d}x}
\newcommand{\ds}{\, \mathrm{d}s}
\newcommand{\Real}{\mathbb{R}}
\newcommand{\Integerp}{\mathbb{N}}
\newcommand{\Integer}{\mathbb{Z}}
$$

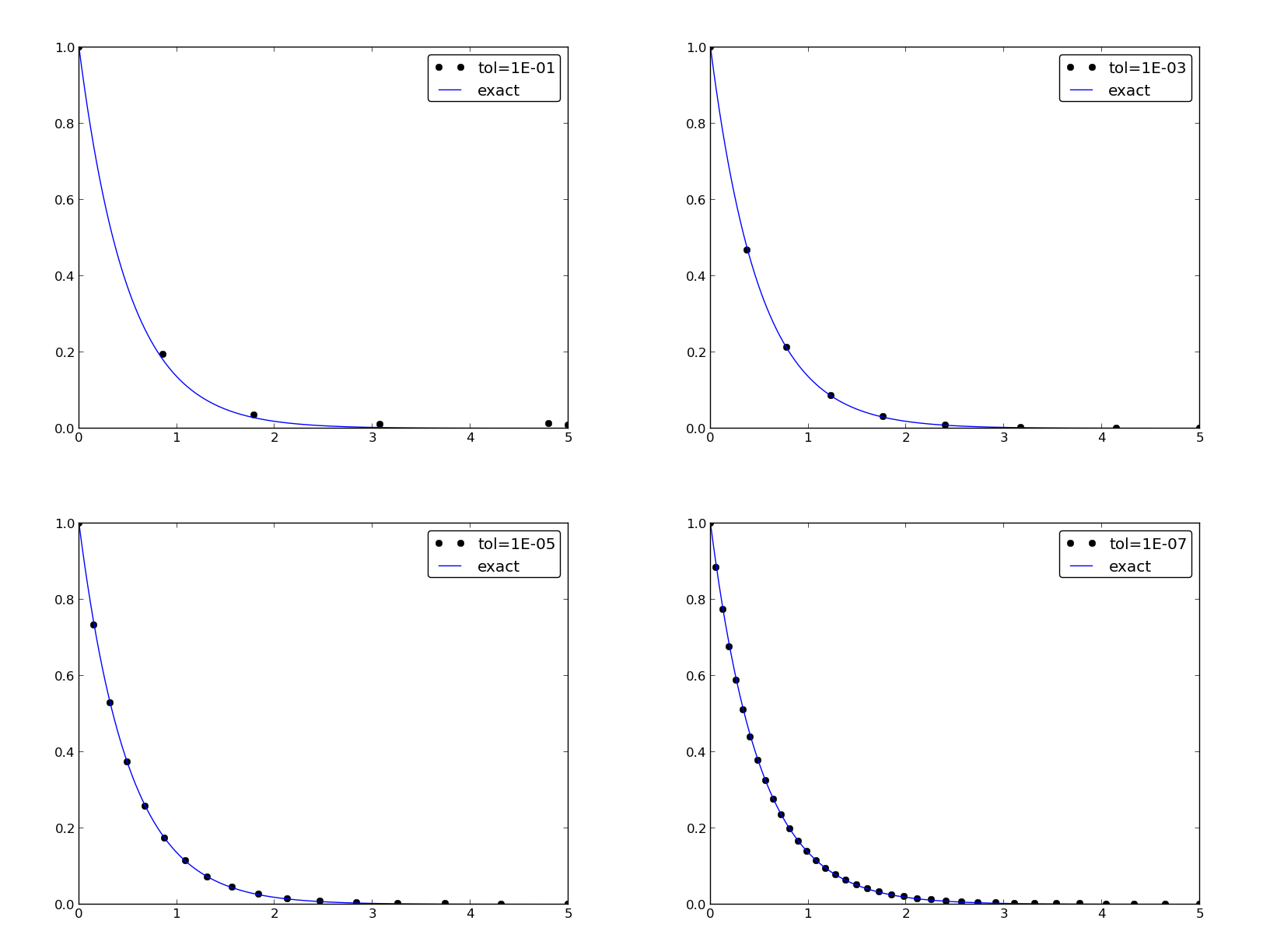
Example: Adaptive Runge-Kutta methods
- Adaptive methods find "optimal" locations of the mesh points
to ensure that the error is less than a given tolerance.
- Downside: approximate error estimation, not always optimal
location of points.
- "Industry standard ODE solver": Dormand-Prince 4/5-th order
Runge-Kutta (MATLAB's famous
ode45).